96mm Hex Force Torque Transducer for Robots
说明

KWR96 series sensor is an industrial lightweight force torque sensor that measures on 6 axes.,features in high strength and large capacity from 100N to 2000N . this torque sensor with digital output and Light weight also contributes to reducing the load on the robot.
- High-precision six-axis torque sensor with large torque range .
- High overload level & Good bending resistance.
- High rigidity and high strength can be met becuase the High-strength duralumin alloy materials.
- High-precision and high-precision measurement values.
- Can be matched with serial port server equipment to support the use of Ethernet related computer or terminal equipment.
- Based on the principle of strain electrical measurement.
- Embedded high-precision data acquisition and processing circuit.
- Directly output the force and torque after decoupling.
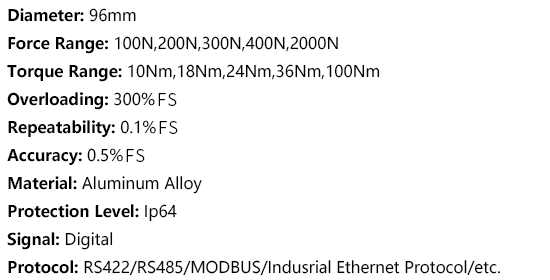
- Accuracy is better than 0.5% FS.
- It can be applied to small industrial robots, cooperative robots, service robots and medical robots.
Do Collaborative Robots Really Need Multi-axis Sensors?
Cobots, by definition, are equipped to sense and react to forces acting on them. So, do they really require more dedicated sensors to do essentially the same thing?
At each of the six joints of the robot, the manufacturer has a torque sensor measuring 1 axis of effort. This measurement depends on the mass and geometry of the robot. If you want to measure the force applied accurately or repeatably, you need to do some approximation of the mass and configuration,” Jobin said. “You don’t get good results by measuring each and every joint, especially not at low cost. Granted, it is possible to do a really great job: the KUKA is one example. The cost of the KUKA is quite high because the torque measurement equipment is quite expensive. That’s why the best way to do it, in our opinion, is to keep a low-level precision force control for safety and get a high-precision sensor at the wrist, where it’s needed.”
It is used in remote control robot, robot surgery, robotic police research, finger force research, precision assembly, automatic grinding, contour tracking, two-hand coordination, zero force teaching and other operations.
 |
 |
 |
Model of KWR96

1)Range
What range of forces can the sensor measure?
2)Durability
How much wear and tear will your application subject the device to? Consider factors like dust, water and contaminants such as paint or glue overspray. The second part of durability is the overload protection of the sensor. If your application is predictable in the range of possible forces, you should choose low overload protection, as this can open the door to higher accuracy.If you’re testing the flapping force of a hummingbird’s wing,you probably don’t need to worry about overloading a sensor.”
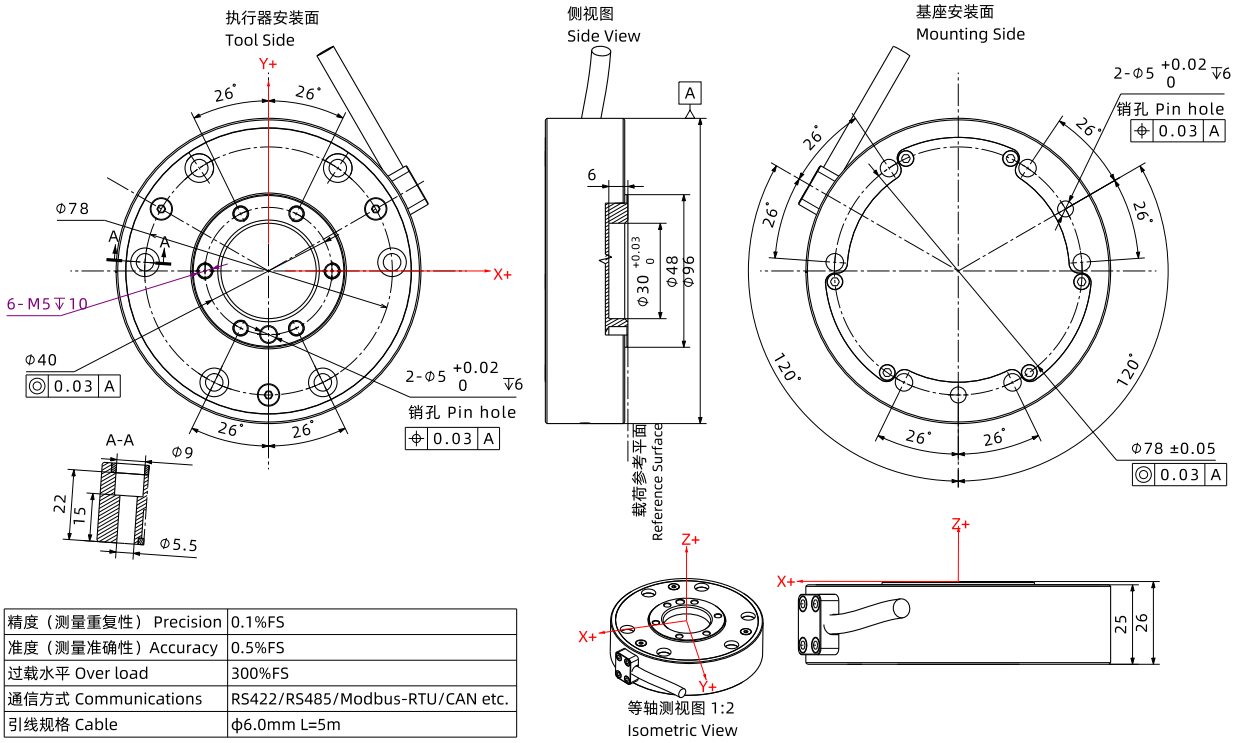
3)Form Factor and Mounting
Several of the sensors on the market today take a hockey puck-like form, ideal for installation at the wrist of a robot. However, you should consider whether the form factor of your sensor will work with your setup. Remember that devices generally get larger as their sensing range increases.
4) Data Bus
All Kunwei’s sensor, are available with several data buses including ethernet,RS422,RS485,Modbus and USB and so on. However, always check to ensure you can work with the bus a sensor uses.