

When the collaborative robot works on the production line, there will be many human-machine cooperation situations. At this time, due to a variety of uncontrollable factors, it will enter the working range of the collaborative robot.
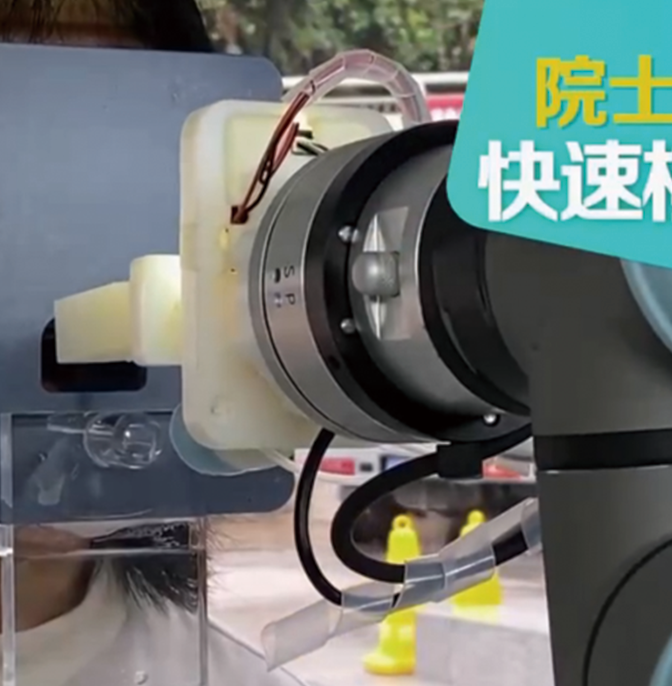
This robot is placed in the nucleic acid asmpling vehicle, it combines the collaborative robot with machine vision and precision force control, and achieves automation in the whole process of pharyngeal swab grasping, collection guidance, contact collection and sample preservation, so as to ensure the sampling efficient, stable, reliable, safe and controllable.
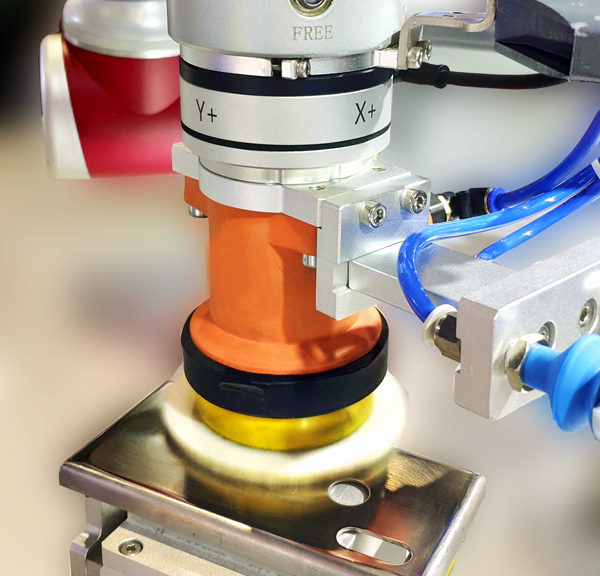
In the polishing of mobilephone backplanes and glass panels, the requirements of polishing strength and uniformity are extremely high. The 6 Dof Load Cell has the characristic of high sensitive, it can collect in real time and output the current load during the polishing process, and completes the force control feedback in real time, which makes the polishing level raises to a higher level and the polishing yield wil also be greatly improved.
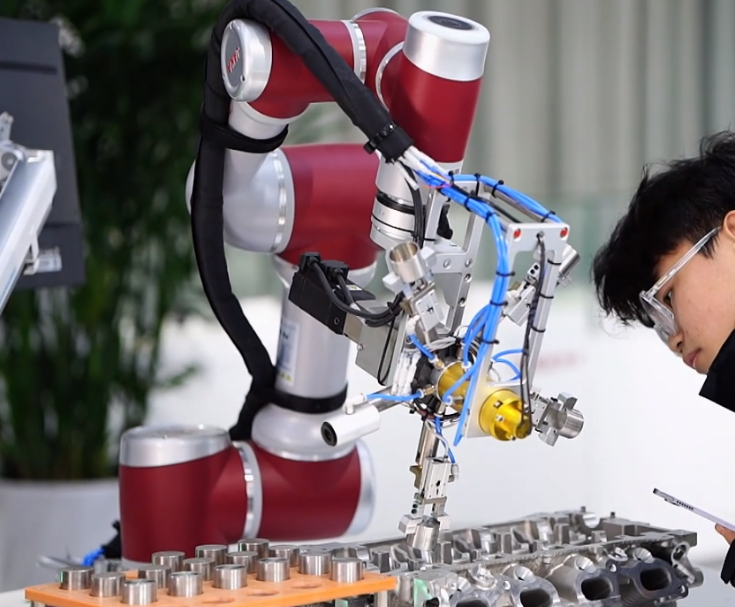
The robots have been widely used in autonomous assembly, and the reliability of robot work can be effectively quaranteed combined with machine vision. However, in the precision assembly industry such as 3C manufacturing, its location accuracy is improved to a higher level, and the complexity of the installation process is also higher.

In the orperation of surface grinding, the robot usally use machine vision system to guide and locate and to realize the grinding of irregular surface. However, with the change of grinding frequency and grinding strength, the consumption degree of end grinding materials shows a nonlinear change ,and it is not easy to reloy on algorithm compensation to adjust the actual grinding strength, so it cannot ahieve good results in detailed grinding and polishing.




