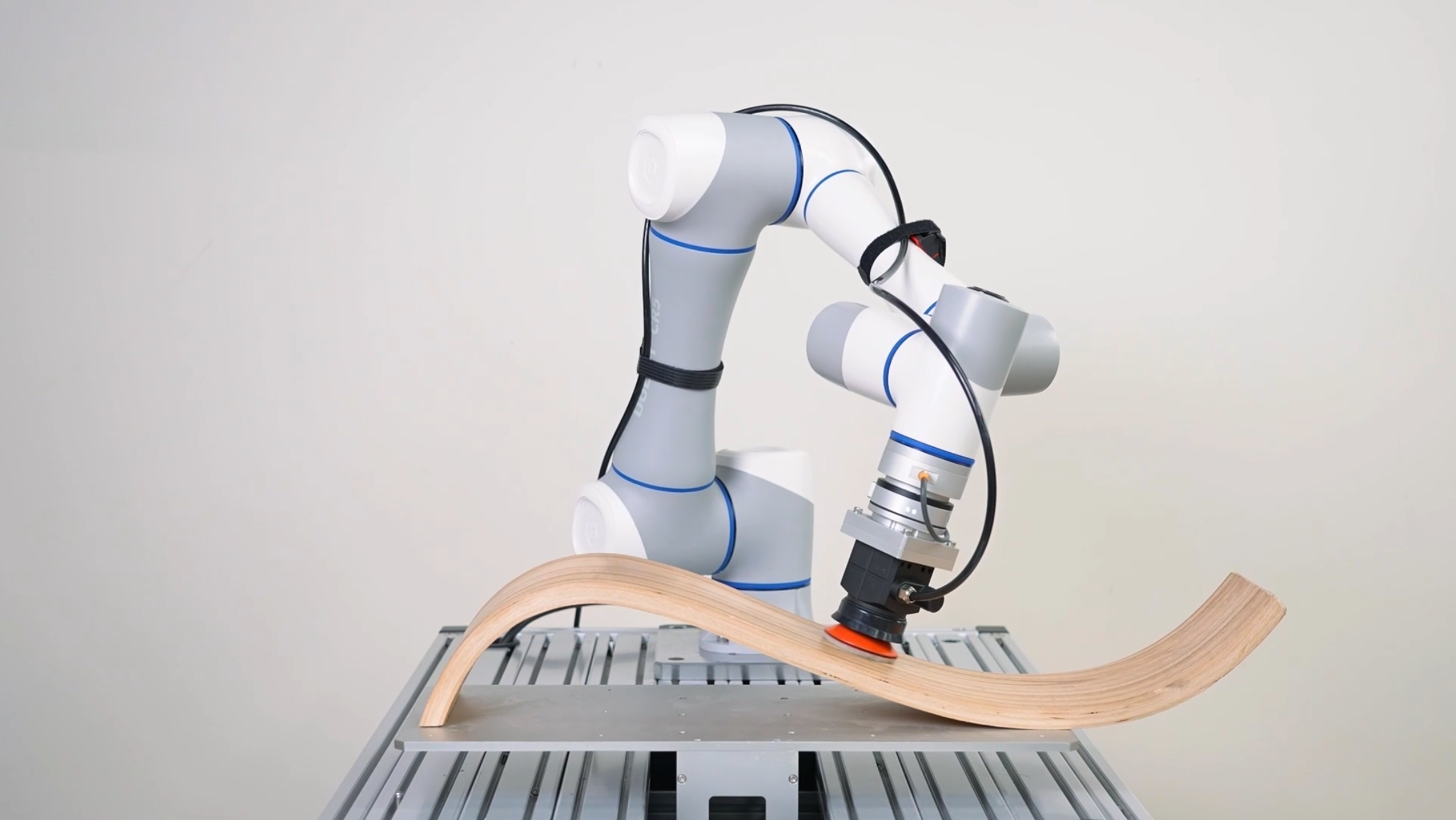
In the orperation of surface grinding, the robot usally use machine vision system to guide and locate and to realize the grinding of irregular surface. However, with the change of grinding frequency and grinding strength, the consumption degree of end grinding materials shows a nonlinear change ,and it is not easy to reloy on algorithm compensation to adjust the actual grinding strength, so it cannot ahieve good results in detailed grinding and polishing.
The F/T sensor is applied to robotic force control surface grinding to provide feedback such as force/torque for fine grinding and polishing, and forms the closed-loop feedback in the control link, which greatly improves the polishing effect of the product, eapecially in the aspects of small workpiece, edge burr, irregular surface and ono-metallic material grinding and so on.
At the same time, the introduction of robot force control can better realize human-computer interaction, achieve more flexible impedance control in the actual production operation process, and also ensure the safety and reliability of human-computer interaction.