Sensores de fuerza de seis ejes de 75 mm para la mayoría de COBOTs
Descripción

El sensor Kunwei puede utilizarse para medir la fuerza en la muñeca del robot en tiempo real y realizar el control activo de salida de fuerza, que es equivalente al nervio sensorial humano. Es un sensor especialmente importante en trabajos de alta complejidad, operaciones restrictivas y operaciones coordinadas. No sólo puede mejorar la flexibilidad de la producción empresarial, sino también reducir en gran medida el coste de reprogramación del robot causado por la sustitución de la línea de producción del producto.
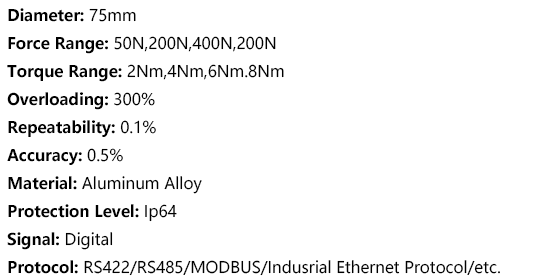
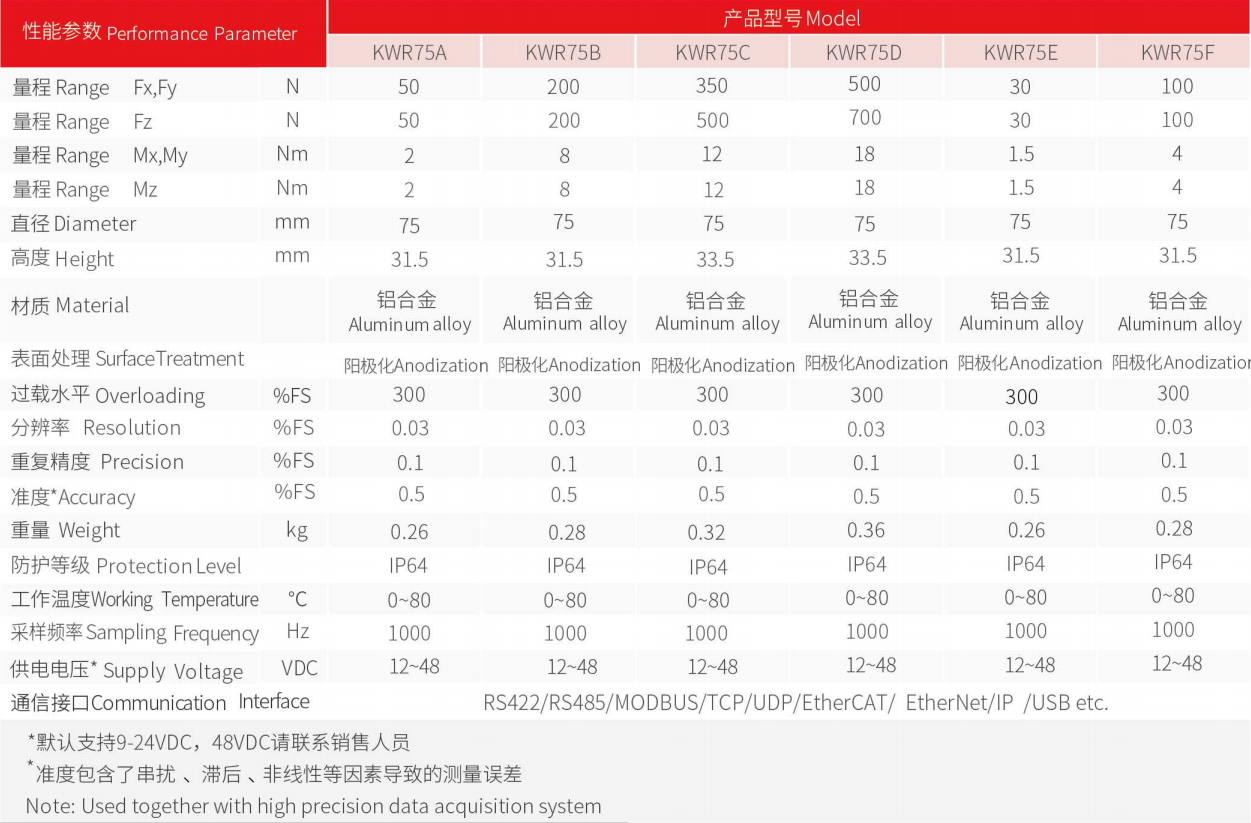
El transductor de la serie KWR75 está integrado en circuitos inteligentes de alta precisión, está equipado con brida adaptadora, el cliente puede instalarlo de forma flexible según sus propias necesidades. La serie está disponible en varios modelos, rango de medición de 30N a 400N. El producto utiliza la señal digital (puerto serie) de salida por defecto, y se puede incrustar en el módulo de adquisición de datos de señal analógica para apoyar la señal analógica (como 0-10V, 4-20mA, etc.) equipos receptores, y un dispositivo de servidor de puerto serie también se puede utilizar para apoyar a los equipos relacionados con Ethernet.
 |
 |
 |
Modelo de KWR75
Una aplicación que vemos a menudo con el sensor es la aplicación de prueba. Un robot está emparejado con un sensor y una pinza y está realizando alguna acción cíclica sobre un producto. El sensor interviene cuando hay que aplicar una fuerza determinada a un dispositivo. El robot puede aplicar una fuerza limitada que ha sido establecida por el programador y también puede controlar esta fuerza. Esto significa que el producto se prueba con una fuerza determinada y que se controla la fuerza para ver si se produce algún cambio en el comportamiento del producto.
Qué aplicaciones requieren lecturas de par
El guiado manual sería un ejemplo que utiliza la información del par. El guiado manual consiste en guiar a un robot con las manos. Esto significa que tienes que aplicar una cierta cantidad de fuerza sobre la herramienta para enseñarle al robot una trayectoria, por ejemplo. Al aplicar la fuerza sobre la herramienta (que está más baja que el sensor), se crea un par. Este par puede leerse en todas las direcciones y la señal puede enviarse al ordenador para su análisis.
Qué aplicaciones requieren fuerza y par
Las tareas de montaje serían un ejemplo de aplicaciones que requieren lecturas tanto de fuerza como de par. De hecho, en una cadena de montaje se pueden encontrar diferentes problemas (desalineación, ajustes estrechos, pruebas de fuerza, etc.). En estas aplicaciones se dan todo tipo de situaciones. Por ejemplo, puede combinar su montaje con un banco de pruebas para comprobar una determinada característica de su montaje. O puede utilizarlo para enseñar a su robot tareas específicas, como la enseñanza del arrastre.
La versatilidad del sensor de fuerza de seis ejes se traduce en una amplia gama de aplicaciones en todos los sectores.
- Fabricación de automóviles
En la fabricación de automóviles, la precisión no es negociable. La capacidad del sensor para detectar variaciones de fuerza garantiza que los componentes encajen a la perfección, reduciendo la probabilidad de errores de montaje.
- Montaje de componentes electrónicos
Los componentes electrónicos delicados exigen una manipulación cuidadosa. La célula de carga de seis ejes permite a los robots navegar por las complejidades del montaje de componentes electrónicos con la precisión exacta necesaria.
- Producción farmacéutica
Los productos farmacéuticos deben cumplir estrictas normas de calidad. Al detectar con precisión las propiedades del material, el sensor ayuda en los procesos de inspección de calidad y envasado.
- Industria alimentaria
Incluso en la industria alimentaria y de bebidas, donde los productos varían mucho, el sensor de fuerza/par de seis ejes destaca. Permite a los robots manipular los productos con la fuerza adecuada, reduciendo los residuos y garantizando la integridad del producto.
- Integración y aplicación
La implementación del sensor F/T de seis ejes en las configuraciones robóticas existentes es un proceso simplificado. Robot proporciona asistencia y recursos completos para garantizar una integración sin problemas. Se facilita la calibración y la configuración, lo que permite a las organizaciones aprovechar todo el potencial del sensor con rapidez.
El sensor de fuerza de seis ejes cuenta con una serie de atributos que lo convierten en un activo codiciado en el ámbito de las aplicaciones robóticas. Como su nombre indica, este sensor funciona en seis ejes, proporcionando datos completos sobre las fuerzas ejercidas en múltiples direcciones. Esta capacidad dinámica permite a los robots percibir hasta las más mínimas variaciones de fuerza, proporcionando un nivel de percepción táctil hasta ahora inalcanzable.
Las ventajas de incorporar el sensor de fuerza de seis ejes a las aplicaciones robóticas son profundas y de gran alcance.
- Mayor precisión en el agarre y la manipulación
El sensor de fuerza de seis ejes permite a los robots agarrar objetos con una precisión inigualable. Tanto si se trata de manipular con delicadeza objetos frágiles como de agarrar objetos de forma irregular, este sensor permite a los robots aplicar la cantidad óptima de fuerza. Esta mayor precisión se traduce en una reducción de los casos de daños durante la manipulación.
- Detección precisa de materiales e inspección de calidad
En las industrias en las que las propiedades y la calidad de los materiales son de suma importancia, el sensor de fuerza de seis ejes brilla con luz propia. Los robots equipados con este sensor pueden detectar con precisión variaciones en las propiedades de los materiales. Esta capacidad tiene un valor incalculable en los procesos de inspección de calidad, ya que garantiza que solo avanzan en la línea de producción los artículos que cumplen las normas más estrictas.
- Espacios de trabajo colaborativos más seguros
Los robots colaborativos, o cobots, han revolucionado la forma en que humanos y robots trabajan juntos. El sensor de fuerza de seis ejes añade un nivel adicional de seguridad a estas interacciones. Al percibir fuerzas inesperadas, el sensor permite a los cobots detener sus movimientos al instante, evitando accidentes y garantizando un entorno de trabajo más seguro.
- Procesos de fabricación y montaje adaptables
Los procesos de fabricación rara vez son estáticos. La capacidad de adaptarse a las variaciones de materiales, dimensiones y condiciones es un sello distintivo de la eficiencia. El sensor de fuerza OnRobot Fore de seis ejes permite a los robots navegar por estas variaciones sin problemas. Desde el ajuste de la fuerza de agarre durante el montaje hasta la adaptación a las desviaciones de los materiales, este sensor garantiza que las tareas robóticas sigan siendo precisas y eficientes.
- Información basada en datos para la optimización de procesos
Los datos son el motor de la optimización. El sensor de fuerza de seis ejes genera una gran cantidad de datos sobre las fuerzas que se producen durante las tareas robóticas. Estos datos pueden aprovecharse para identificar patrones, anomalías y oportunidades de mejora. Las organizaciones pueden ajustar sus procesos basándose en estos datos, mejorando la eficiencia general.