在讨论传感器的校准和检测之前,我们先来了解一下什么是校准和检测。
校准 是通过传感器加载理论载荷并记录相应的原始信号来获得传感器内部算法的参数。即建立传感器原始信号与力之间的映射关系。
检测 就是通过加载已知的理论真值并记录测量结果,然后计算和比较测量结果与理论真值之间的差值,从而获得传感器的精度和准确度。这就是测试传感器是否准确。
简而言之,校准是为了获得传感器的固件参数,检测是为了获得传感器的精度和准确度。首先谈谈标定。
对于多轴称重传感器,校准需要同时考虑六个组件。
如果只考虑 X 轴方向上的±25%、±50%、±75% 和±100% 四个步骤来精确加载和校准传感器(图 1),则图中的红点代表校准采样点。
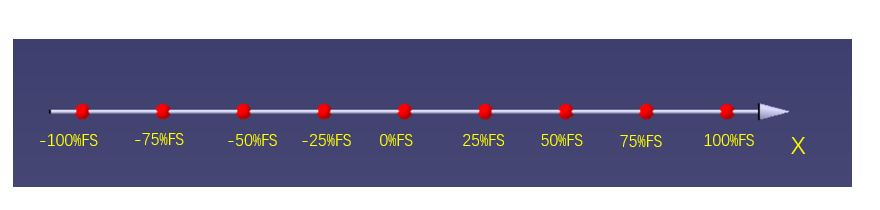
图 1
如果同时考虑 X 轴和 Y 轴的联合加载校准,则不仅要考虑 X 轴和 Y 轴上的采样点(图 2),还要考虑 XY 平面上的其他采样点(图 3 黄色点),黄色点也称为 "交叉采样点"。显然,当您将传感器的 X 轴和 Y 轴联合加载时,校准采样空间将从一维直线变为二维平面。
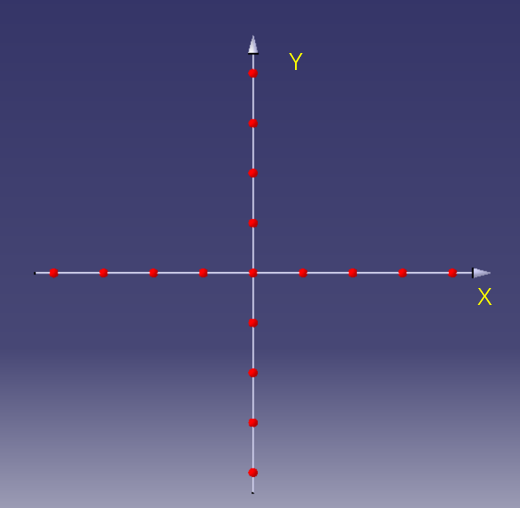
图 2
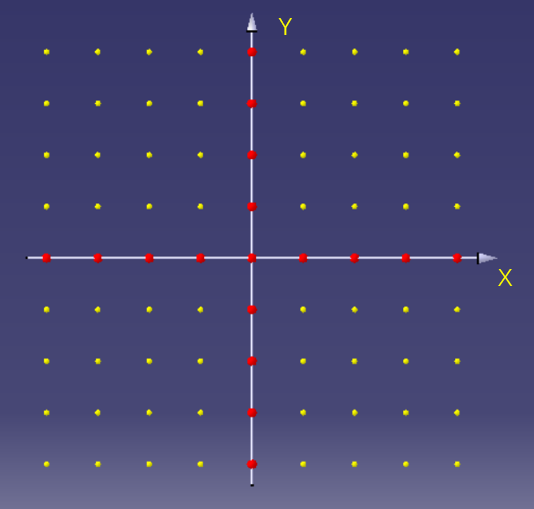
图 3
如果将传感器的 X、Y 和 Z 三个方向同时加载(图 4),则整个加载的样品平面将变成三维空间(图 5)。
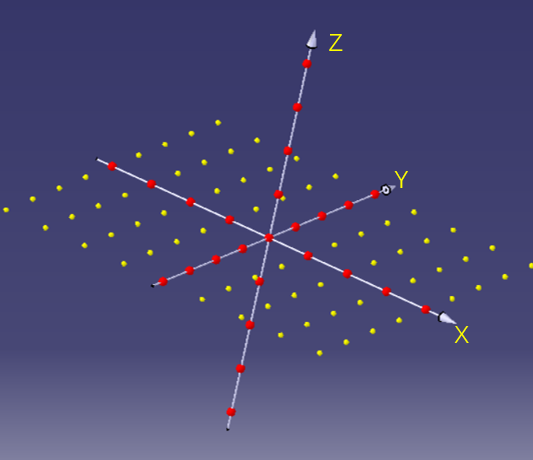
图 4
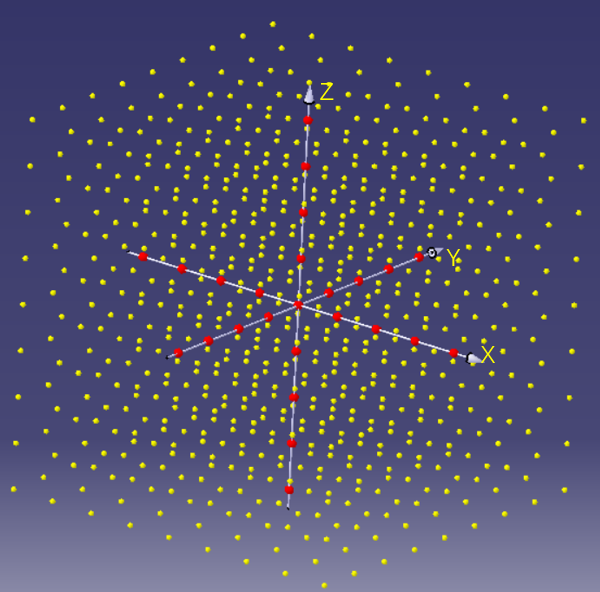
图 5
这种对坐标轴外黄色交叉样点的加载称为关节加载。在六轴力/扭矩传感器的校准过程中,三个方向的力和三个方向的扭矩同时加载,称为六维联合校准。一轴称重传感器,如拉力和压缩称重传感器,只需要 9 个采样点进行校准。但如果每个维度都需要 9 个采样点,则六轴力/扭矩传感器将包括 531441 个采样点(图 6)。
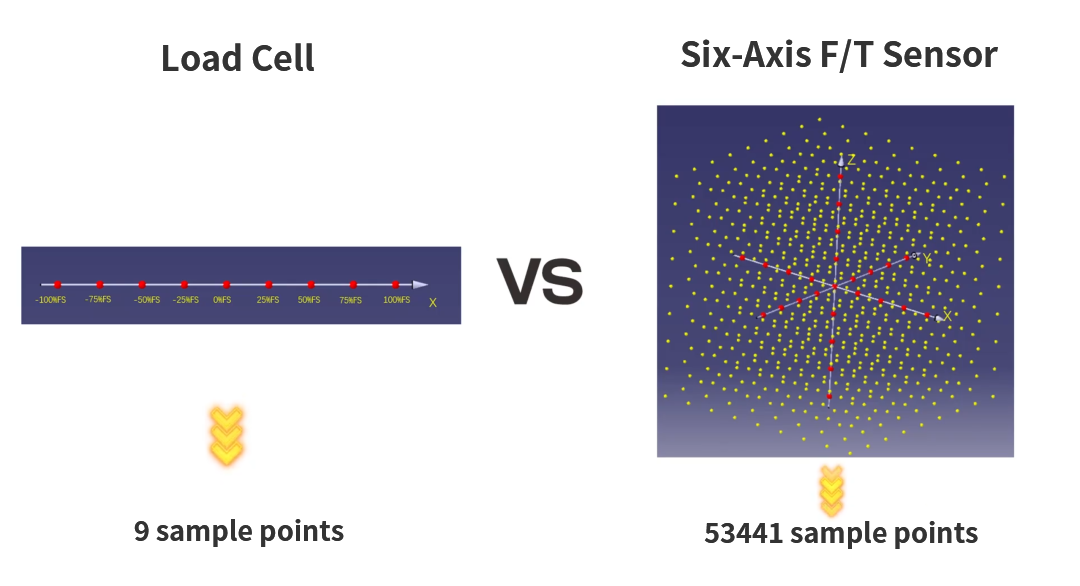
图 6
在六维关节载荷校准中使用多种样点将带来三个优势。首先,交叉样点可以使传感器的模拟载荷非常接近实际使用情况。其次,在多轴载荷传感器的同时作用下,便于研究传感器的非线性机械特性,并能有效改进传感器结构的设计。最后,基于非线性特性的标定可以大大优化解耦算法的数学模型。
总之,使用六维力联合加载的校准装置,可以使传感器的精度更高,串扰更低。当六轴扭矩传感器同时承受多个维度的力时,其非线性特性非常显著。六维线性模型的叠加无法准确描述这种非线性效应。
这就是本期的全部内容。如果您想要高品质的测力方案,请关注坤为科技。下次再见