

Der Anwendungsmarkt für kollaborative Roboter ist sehr breit gefächert, und es gibt auch zahlreiche Anwendungsszenarien in der Unterhaltungsindustrie, wie z. B. Roboterarm-Puppen, Kaffeeräumer, Eiscreme-Hersteller, Nudelhersteller usw.
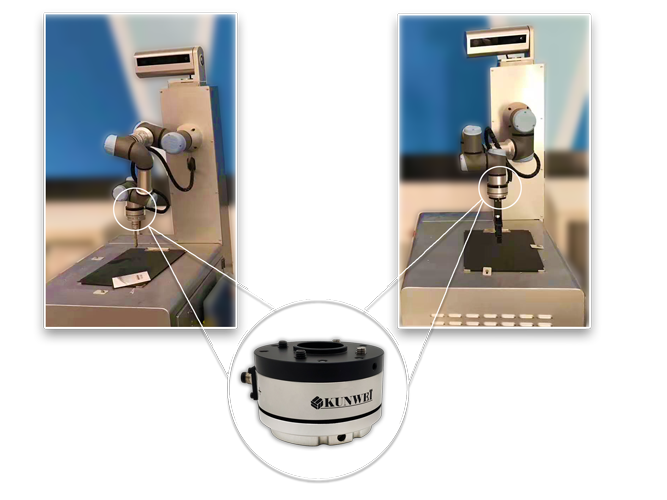
Die Zusammenarbeit zwischen Mensch und Maschine hat allmählich Einzug in den Markt gehalten, und die technische Ausbildung im Zusammenhang mit Maschinenkraftsensoren hat sich allmählich in der Bildungs- und Ausbildungsbranche etabliert. Der Sechs-Achsen-Kraftsensor hat einen guten Anzeigeeffekt bei einfachen Anwendungen wie der Anzeige von nachgiebigem Schleifen, Antikollisionstests, Präzisionsmontage und Reproduktionsstrecken.
Wenn der Robotergreifer etwas hält, wird er oft durch den Motor am Greifer gesteuert, um den Neigungswinkel des Greifers und des Motors einzustellen, damit das Greifen des Greiferendes und des Objekts realisiert werden kann.

Die Anforderungen an den flexiblen Einsatz und die schnelle Reaktion von Robotern werden immer höher. Bei der Dragging-Teaching-Technologie werden die Informationen des Lernprozesses manuell aufgezeichnet und die Körperhaltung oder die Bewegungsbahn nach Erreichen eines bestimmten Haltungszustands oder einer bestimmten Bewegungsbahn direkt durch den handgeführten Roboter vollständig reproduziert.

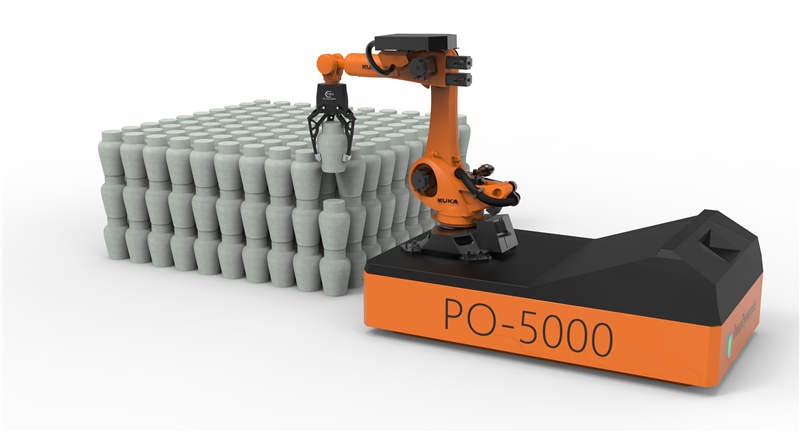
In der Automobilindustrie wird die Produktqualität streng kontrolliert. Die Prüfung von kleinen und leichten Teilen wird oft von Hochfrequenztests begleitet. Insbesondere einige wichtige Teile müssen Zehntausende von Tests bestehen, bevor sie verwendet werden dürfen.

Kollaborationsroboter werden nach und nach im Bereich der Massage und Physiotherapie eingesetzt. Die maschinelle Bildverarbeitung kann die Akupunkturpunkte des Benutzers besser lokalisieren, um eine genaue Positionierung und Massage zu erreichen und bessere Ergebnisse zu erzielen.




