

The application market of collaborative robots is very wide, and there are also large application scenarios in the consumer entertainment industry, such as robot arm dolls, coffee broaching, ice cream production, sliced noodles production, etc.
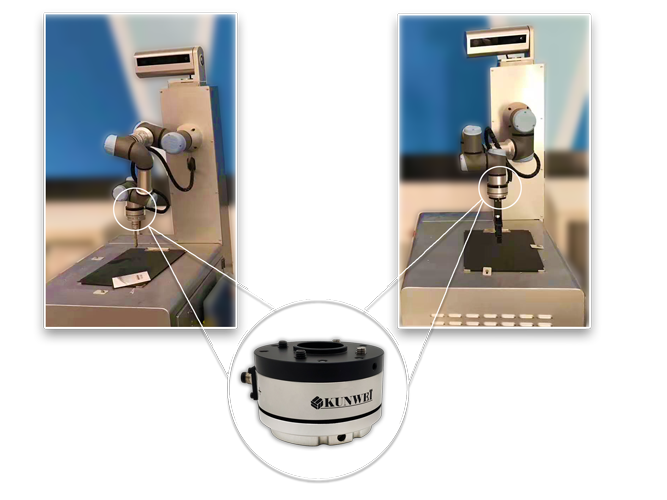
人机合作已逐渐进入市场,与机器力传感器相关的技术培训也逐渐在教育培训行业兴起。六轴力传感器在顺应性拖动指示、防碰撞测试、精密装配和再现轨道等简单应用中具有良好的显示效果。
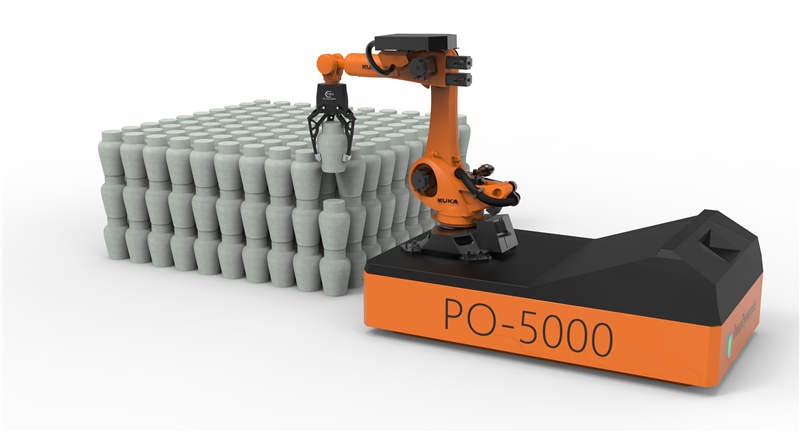
When robot gripper holds something, it is often controlled by the motor on the gripper to adjust the inclination angle of the gripper and the motor, so as to realize the grasping of the end of gripper and the object.

Now our requirements for flexible application and rapid response of robots are gradually increasing. Dragging teaching technology is the process of manually recording the information of teaching process and completely reproducing its posture or motion trajectory after reaching the specified posture state or specific motion trajectory through the handheld robot directly.

The automotive industry has strict control over product quality. When testing small and lightweight parts, it is often accompanied by high-frequency testing. Especially for some key parts, it is required to pass tens of thousands of tests before being allowed to use.

Collaborative robots have gradually been promoted in the field of massage and physiotherapy. Its machine vision can better locate the user’s acupoints, so as to achieve accurate positioning and massage, and achieve better results.




