

Il mercato di applicazione dei robot collaborativi è molto ampio e vi sono anche grandi scenari applicativi nell'industria dell'intrattenimento di consumo, come le bambole con braccio robotico, la spillatura del caffè, la produzione di gelati, la produzione di tagliatelle, ecc.
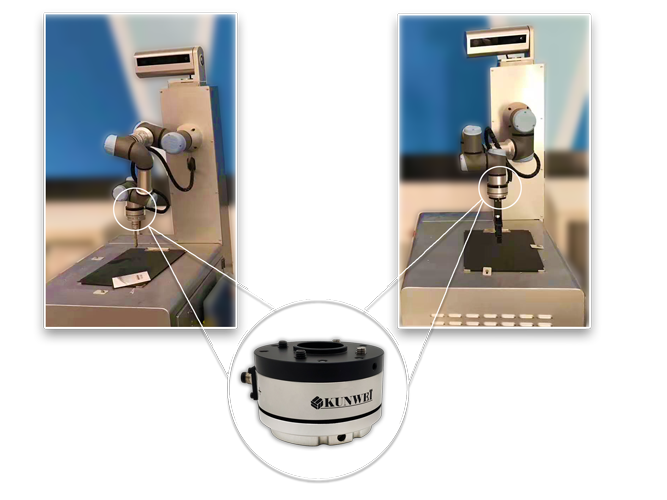
La cooperazione uomo-macchina è entrata gradualmente nel mercato e la formazione tecnica relativa ai sensori di forza delle macchine è emersa gradualmente nel settore dell'istruzione e della formazione. Il sensore di forza a sei assi ha un buon effetto di visualizzazione in applicazioni semplici come l'indicazione del trascinamento conforme, il test anticollisione, l'assemblaggio di precisione e la riproduzione dei binari.
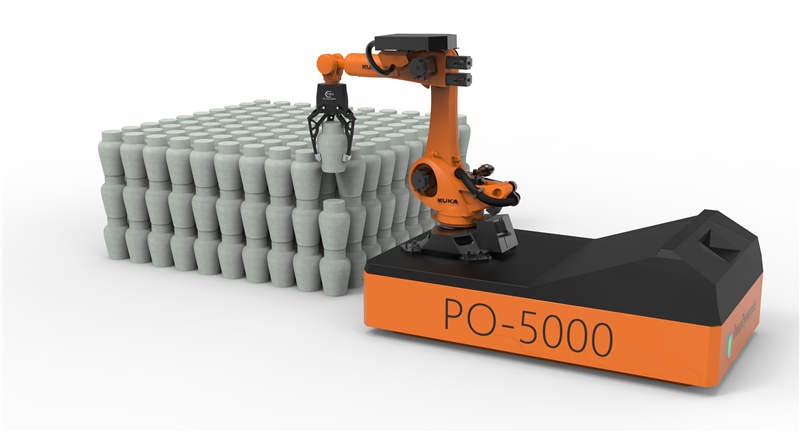
Quando la pinza robotica afferra qualcosa, è spesso controllata dal motore della pinza per regolare l'angolo di inclinazione della pinza e del motore, in modo da realizzare la presa dell'estremità della pinza e dell'oggetto.

Oggi i requisiti per un'applicazione flessibile e una risposta rapida dei robot stanno gradualmente aumentando. La tecnologia di insegnamento a trascinamento è il processo di registrazione manuale delle informazioni del processo di insegnamento e di riproduzione completa della postura o della traiettoria di movimento dopo aver raggiunto lo stato di postura specificato o la traiettoria di movimento specifica attraverso il robot portatile direttamente.

L'industria automobilistica ha un controllo rigoroso sulla qualità dei prodotti. Il collaudo di componenti piccoli e leggeri è spesso accompagnato da test ad alta frequenza. Soprattutto per alcuni componenti chiave, è necessario superare decine di migliaia di test prima di poterli utilizzare.

I robot collaborativi sono stati gradualmente promossi nel campo del massaggio e della fisioterapia. La visione artificiale può localizzare meglio gli agopunti dell'utente, in modo da ottenere un posizionamento e un massaggio precisi e ottenere risultati migliori.




