In nearly a month, we found that some customers only focused on the contact force of the robot end tool, so that they think the 3-axis force sensor is enough to use.
We often encounter this similar situation. In fact, the manufacturing of the 6-axis force sensor is more difficulty than 3-axis force sensor. Our company can provide multiple ranges of 6-axis force sensors and 3-axis force sensors, but there are still many limitations in the use of 3-axis force sensors. We suggest that we need to use six axis force sensor if the point of force is far away form the sensor and the direction of the force is random, even if you only need the information of the force in three directions and needn’t to know the range of the bending moment.
To explain this problem more clearly, let us look the applicaion scenarios of 1-axis force sensor.
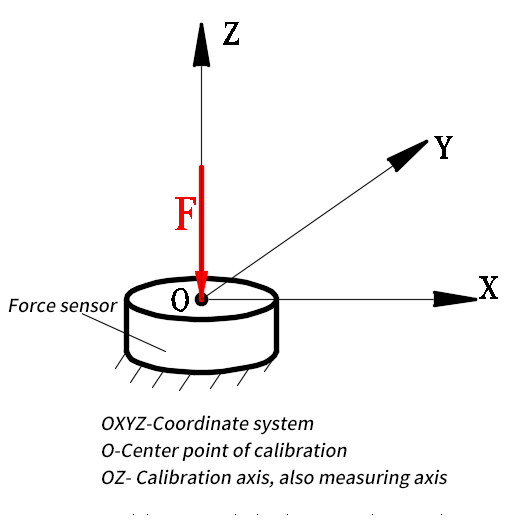
We know that the force is a vector, so that it has both range and direction. Only when the direction of the force completely coincides with the measurement axis of 1-axis force sensor, it can accurately measure(Fig.1). The measurement axis is generally the geometric center line of the sensor.
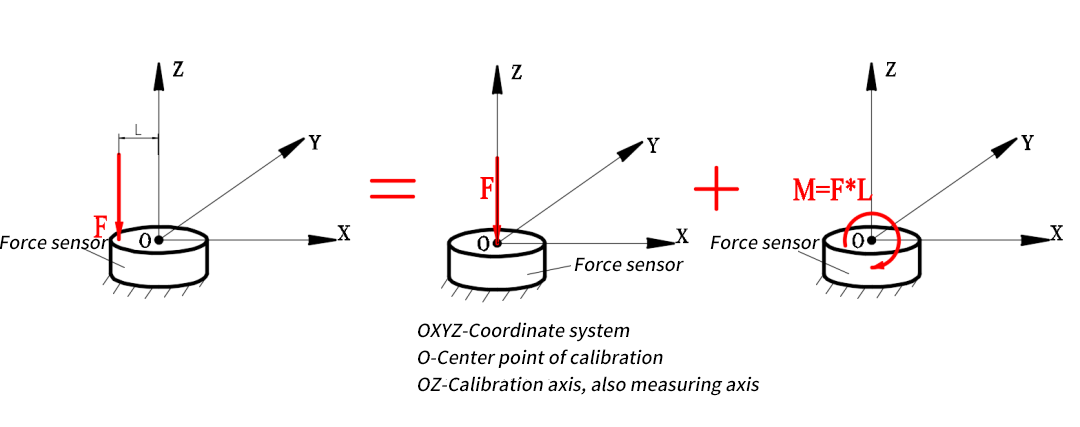
When the direction of the force is parallel to the measurement axis of the sensor but not coincident with it, the measurements results of the sensor will have a large error. According to the translation equivalence principle of force in theoretical mechanics, it is equivalent to a force and bending moment acting on the sensor at the same time(Fig.2). After the translation equivalent, the range and direction of the force are the same as before for the sensor, but there is an additional bending moment FL. This bending moment will produce a certain bending deformation effect on the sensor, and the deformation mode deviates from the calibration state of the sensor, so it leads to a large error of the sensor.Of course, some one-dimensional force sensors’structure have a certain anti-eccentricity ability, but when the eccentricity distance is large and bending moment is large, there will also be obvious measurement errors.
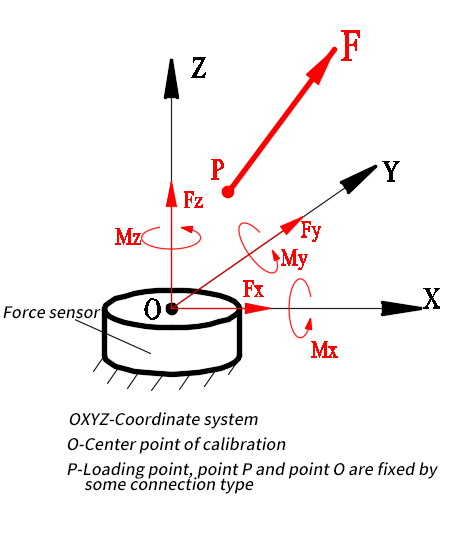
Let us discuss the three-dimensional force sensor. The calibration center of the 3-axis force sensor is generally on the sensor or very close to the sensor. So the same reason, as long as the loading point of the force is away from the sensor, the force after orthogonal decomposition and translation to the calibration center of the three-axis force sensor, the sensor is to bear the force Fx/Fy/Fz three components, but also bear the Mx/My/Mz three bending moments(Fig.3). Mx/My/Mz will inevitably interfere with the measurement accuracy of Fx/Fy/Fz, the bending moment is greater, the measurement of the three-axis force is more inaccurate. The reason for this phenomenon is that when the 3-axis force sensor is loaded and calibrated, it is impossible to consider the variable of bending moment. At this time, the calibrated mathematical model and parameters cannot correct and eliminate the interference of bending moment on force.
Just last week, we sent two kinds of force sensors to a well-known enterprise customer that produces surgical robots for trial, including a common structure 3-axis force sensor and a Kunwei 6-axis force sensor. In order to save the cost, this customer choosed the 3-axis force sensor to achieve the product’s performance. After comparing the effects of two sensors trial, this customer finally choose the six-axis force sensor.
The decoupling algorithm of six axis F/T sensor based on six-dimensional joint loading can accurately correct the coupling error between the three direction force and three direction bending moment, which greatly eliminates the interference of bending moment on force measurement, so that the measurement accuracy of force is much higher than 3 axis force sensor. It is based on a high precision six dimensional joint loading calibration method to obtain a decoupled mathematical model with strong nonlinear fitting ability.
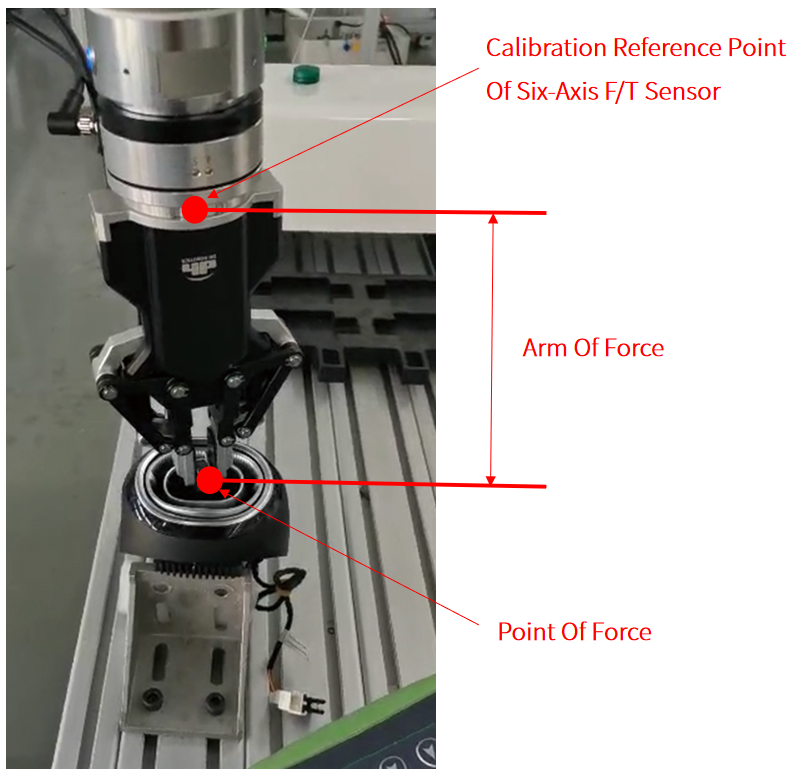
If you encounter similar problems, especially in robot force control applications, there is no need to think about whether to use a 3 axis force sensor or six axis force sensor(Fig.5). Using six axis F/T sensor, can not only measure the force value more accurately, but also monitor the bending moment in real time to prevent the irreversible damage caused by the overload of the bending moment, and can also be used to control the attitude of the end effector through the bending moment data. When the end contact force is very small, the bending moment corresponding to these forces will be relatively more sensitive, and the bending moment can be used to indirectly monitor the contact force, due to the arm of the force is the amplifier of force. This method is more common in the force control application of the pharyngeal test paper sampling robot.
3 sxis force sensors can also be used in some suitations, such as when the loading point is close to the calibration center of the sensor and the demanding on measuring accuracy is not high, or when multiple 3 axis force sensors are used at the same time. This involves more professional fitting and data processing, we will introduce it in the future article.
.jpg)