In fast einem Monat haben wir festgestellt, dass einige Kunden sich nur auf die Kontaktkraft des Roboterendwerkzeugs konzentrieren, so dass sie denken, der 3-Achsen-Kraftsensor sei ausreichend.
Wir treffen oft auf diese ähnliche Situation. In der Tat ist die Herstellung des 6-Achsen-Kraftsensors schwieriger als der 3-Achsen-Kraftsensor. Unser Unternehmen kann mehrere Bereiche von 6-Achsen-Kraftsensoren und 3-Achsen-Kraftsensoren anbieten, aber es gibt noch viele Einschränkungen bei der Verwendung von 3-Achsen-Kraftsensoren. Wir empfehlen die Verwendung eines 6-Achsen-Kraftsensors, wenn der Kraftpunkt weit vom Sensor entfernt ist und die Richtung der Kraft zufällig ist, auch wenn Sie nur die Informationen über die Kraft in drei Richtungen benötigen und den Bereich des Biegemoments nicht kennen müssen.
Um dieses Problem zu verdeutlichen, lassen Sie uns die Anwendungsszenarien eines 1-Achsen-Kraftsensors betrachten.
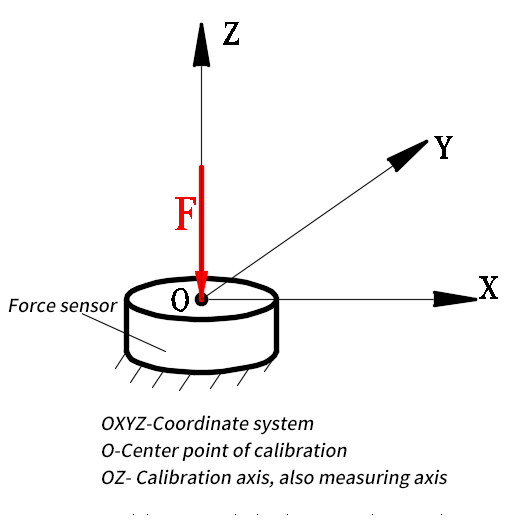
Wie wir wissen, ist die Kraft ein Vektor, d.h. sie hat sowohl einen Bereich als auch eine Richtung. Nur wenn die Richtung der Kraft vollständig mit der Messachse des 1-Achsen-Kraftsensors übereinstimmt, kann er genau messen (Abb.1). Die Messachse ist im Allgemeinen die geometrische Mittellinie des Sensors.
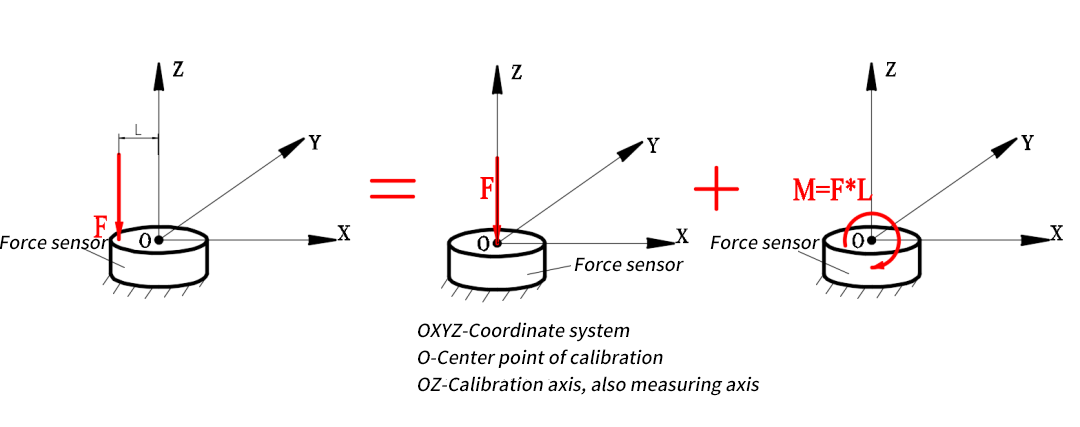
Wenn die Richtung der Kraft parallel zur Messachse des Sensors verläuft, aber nicht mit ihr zusammenfällt, weisen die Messergebnisse des Sensors einen großen Fehler auf. Nach dem Translationsäquivalenzprinzip der Kraft in der theoretischen Mechanik ist sie äquivalent zu einer Kraft und einem Biegemoment, die gleichzeitig auf den Sensor wirken (Abb.2). Nach der Translationsäquivalenz sind der Bereich und die Richtung der Kraft für den Sensor die gleichen wie vorher, aber es gibt ein zusätzliches Biegemoment FL. Dieses Biegemoment bewirkt eine gewisse Biegeverformung des Sensors, und der Verformungsmodus weicht vom Kalibrierungszustand des Sensors ab, was zu einem großen Fehler des Sensors führt. Natürlich haben einige eindimensionale Kraftsensoren eine gewisse Antiexzentrizitätsfähigkeit, aber wenn der Exzentrizitätsabstand groß und das Biegemoment groß ist, kommt es auch zu offensichtlichen Messfehlern.
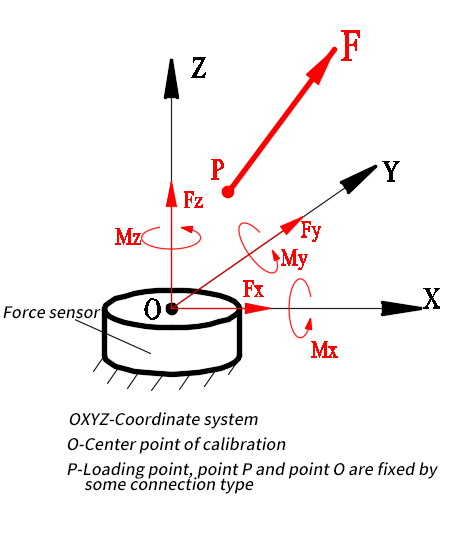
Lassen Sie uns über den dreidimensionalen Kraftsensor sprechen. Das Kalibrierungszentrum des 3-Achsen-Kraftsensors befindet sich in der Regel auf dem Sensor oder ganz in der Nähe des Sensors. Also der gleiche Grund, solange der Ladepunkt der Kraft ist weg von dem Sensor, die Kraft nach orthogonalen Zerlegung und Übersetzung in die Kalibrierung Zentrum der drei-Achsen-Kraft-Sensor, der Sensor ist die Kraft Fx/Fy/Fz drei Komponenten zu tragen, sondern auch die Mx/My/Mz drei Biegemomente(Abb.3) tragen. Mx/My/Mz stören unweigerlich die Messgenauigkeit von Fx/Fy/Fz, das Biegemoment ist größer, die Messung der dreiachsigen Kraft ist ungenauer. Der Grund für dieses Phänomen ist, dass bei der Belastung und Kalibrierung des dreiachsigen Kraftsensors die Variable des Biegemoments nicht berücksichtigt werden kann. Zu diesem Zeitpunkt können das kalibrierte mathematische Modell und die Parameter den Einfluss des Biegemoments auf die Kraft nicht korrigieren und eliminieren.
Erst letzte Woche haben wir einem bekannten Unternehmen, das chirurgische Roboter herstellt, zwei Arten von Kraftsensoren zur Erprobung zugesandt, darunter einen 3-Achsen-Kraftsensor herkömmlicher Bauart und einen 6-Achsen-Kraftsensor von Kunwei. Um Kosten zu sparen, entschied sich der Kunde für den 3-Achsen-Kraftsensor, um die Leistung des Produkts zu erreichen. Nach einem Vergleich der Auswirkungen der beiden Sensoren entschied sich der Kunde schließlich für den sechsachsigen Kraftsensor.
Der Entkopplungsalgorithmus des sechsachsigen F/T-Sensors, der auf der sechsdimensionalen Gelenkbelastung basiert, kann den Kopplungsfehler zwischen der Kraft in drei Richtungen und dem Biegemoment in drei Richtungen genau korrigieren, wodurch die Beeinträchtigung der Kraftmessung durch das Biegemoment weitgehend beseitigt wird, so dass die Messgenauigkeit der Kraft viel höher ist als bei einem dreiachsigen Kraftsensor. Es basiert auf einer hochpräzisen sechsdimensionalen Gelenkbelastungs-Kalibrierungsmethode, um ein entkoppeltes mathematisches Modell mit starker nichtlinearer Anpassungsfähigkeit zu erhalten.
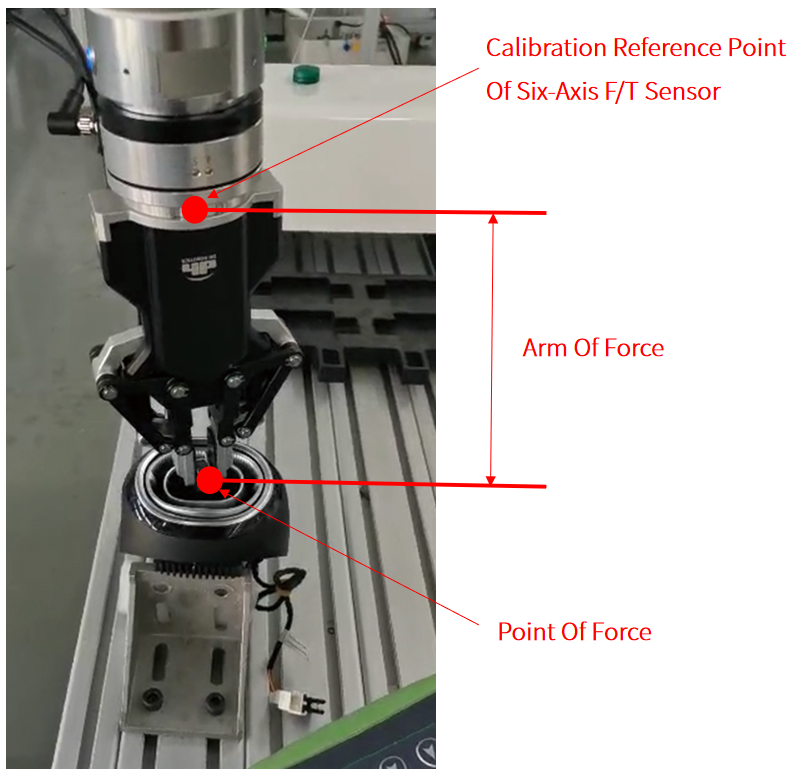
Wenn Sie auf ähnliche Probleme stoßen, insbesondere bei Anwendungen zur Kraftkontrolle von Robotern, brauchen Sie nicht darüber nachzudenken, ob Sie einen 3-Achsen-Kraftsensor oder einen 6-Achsen-Kraftsensor (Abb. 5) verwenden sollten. Die Verwendung eines sechsachsigen F/T-Sensors kann nicht nur den Kraftwert genauer messen, sondern auch das Biegemoment in Echtzeit überwachen, um irreversible Schäden durch die Überlastung des Biegemoments zu verhindern, und kann auch verwendet werden, um die Haltung des Endeffektors durch die Biegemomentdaten zu steuern. Wenn die Endkontaktkraft sehr klein ist, wird das Biegemoment, das diesen Kräften entspricht, relativ empfindlich sein, und das Biegemoment kann verwendet werden, um die Kontaktkraft indirekt zu überwachen, da der Arm der Kraft der Verstärker der Kraft ist. Diese Methode ist häufiger in der Kraftkontrolle Anwendung der pharyngealen Testpapier Probenahme Roboter.
3-Achsen-Kraftsensoren können auch in einigen Fällen verwendet werden, z. B. wenn der Belastungspunkt nahe am Kalibrierungszentrum des Sensors liegt und die Anforderungen an die Messgenauigkeit nicht hoch sind, oder wenn mehrere 3-Achsen-Kraftsensoren gleichzeitig verwendet werden. Dies erfordert eine professionellere Anpassung und Datenverarbeitung, die wir in einem zukünftigen Artikel vorstellen werden.
.jpg)