

Cuando el robot colaborativo trabaje en la línea de producción, habrá muchas situaciones de cooperación hombre-máquina. En ese momento, debido a una variedad de factores incontrolables, entrará en el rango de trabajo del robot colaborativo.
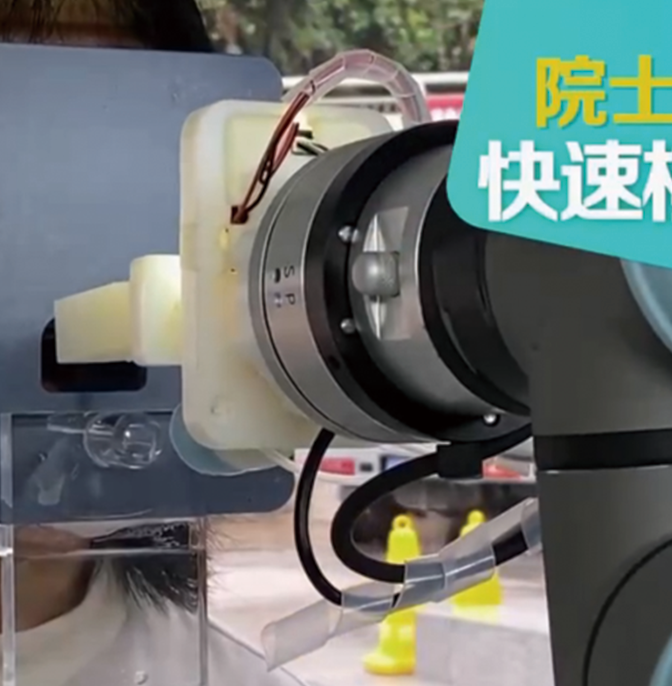
Este robot se coloca en el vehículo de muestreo de ácido nucleico, combina el robot colaborativo con la visión artificial y el control de fuerza de precisión, y consigue la automatización en todo el proceso de agarre del hisopo faríngeo, la guía de recogida, la recogida por contacto y la conservación de la muestra, a fin de garantizar que el muestreo sea eficaz, estable, fiable, seguro y controlable.
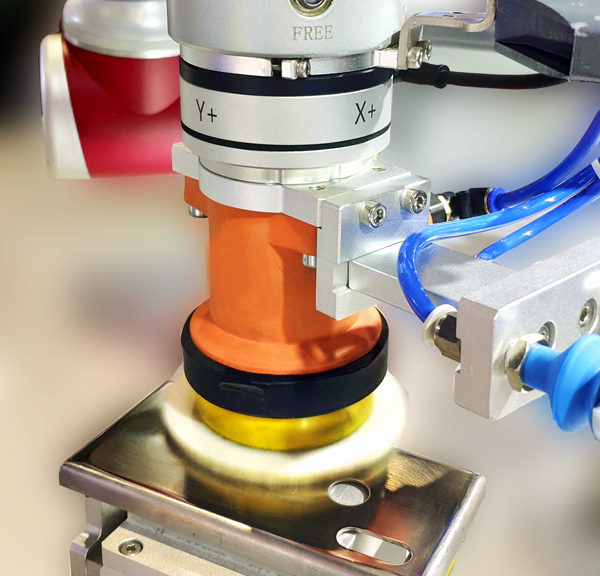
In the polishing of mobilephone backplanes and glass panels, the requirements of polishing strength and uniformity are extremely high. The 6 Dof Load Cell has the characristic of high sensitive, it can collect in real time and output the current load during the polishing process, and completes the force control feedback in real time, which makes the polishing level raises to a higher level and the polishing yield wil also be greatly improved.
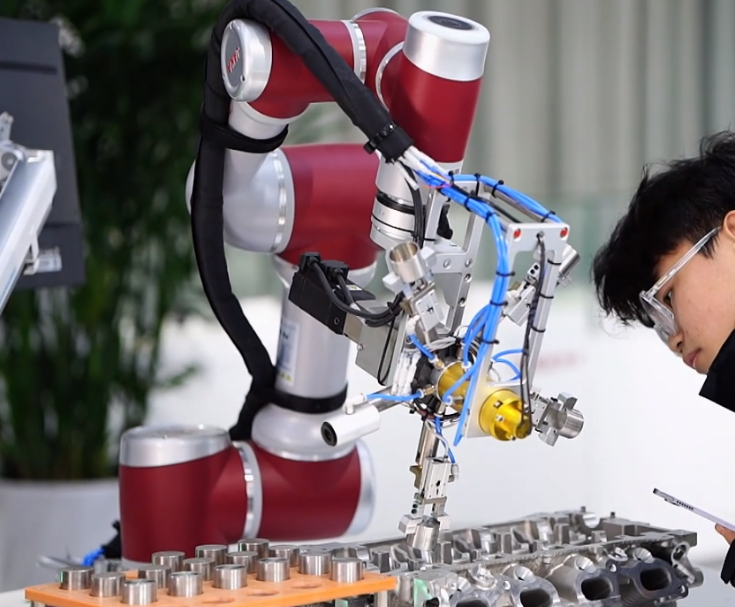
The robots have been widely used in autonomous assembly, and the reliability of robot work can be effectively quaranteed combined with machine vision. However, in the precision assembly industry such as 3C manufacturing, its location accuracy is improved to a higher level, and the complexity of the installation process is also higher.

In the orperation of surface grinding, the robot usally use machine vision system to guide and locate and to realize the grinding of irregular surface. However, with the change of grinding frequency and grinding strength, the consumption degree of end grinding materials shows a nonlinear change ,and it is not easy to reloy on algorithm compensation to adjust the actual grinding strength, so it cannot ahieve good results in detailed grinding and polishing.




