

O mercado de aplicações dos robôs colaborativos é muito vasto, existindo também grandes cenários de aplicação na indústria do entretenimento de consumo, como bonecos com braços robóticos, brocagem de café, produção de gelados, produção de massa fatiada, etc.
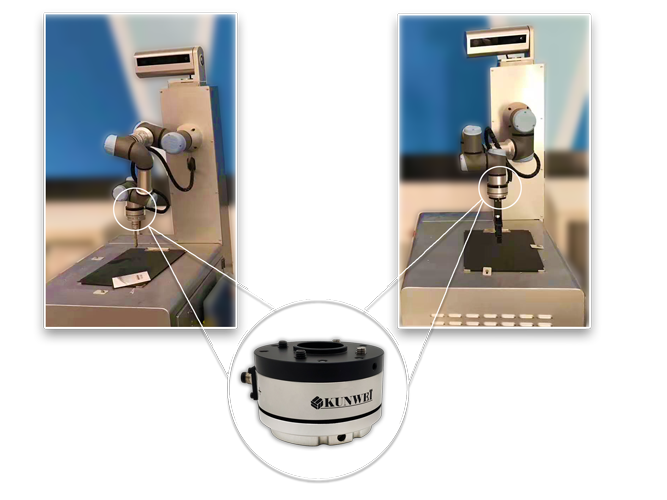
A cooperação homem-máquina tem entrado gradualmente no mercado, e a formação técnica relacionada com os sensores de força das máquinas tem surgido gradualmente na indústria da educação e formação. O sensor de força de seis eixos tem um bom efeito de visualização em aplicações simples, como a indicação de arrastamento compatível, teste anti-colisão, montagem de precisão e pista de reprodução.
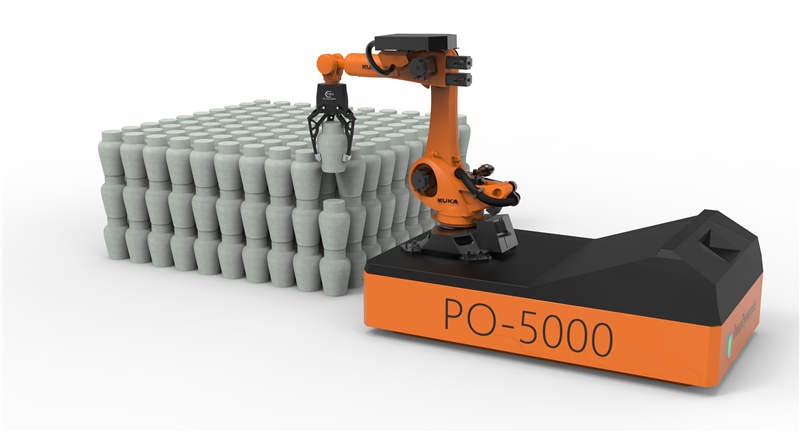
Quando a pinça robótica segura algo, é muitas vezes controlada pelo motor da pinça para ajustar o ângulo de inclinação da pinça e do motor, de modo a conseguir agarrar a extremidade da pinça e o objeto.

Atualmente, as nossas necessidades de aplicação flexível e de resposta rápida dos robôs estão a aumentar gradualmente. A tecnologia de ensino por arrastamento é o processo de registo manual das informações do processo de ensino e de reprodução completa da sua postura ou trajetória de movimento após atingir o estado de postura especificado ou a trajetória de movimento específica através do robô portátil diretamente.

A indústria automóvel tem um controlo rigoroso da qualidade dos produtos. O ensaio de peças pequenas e leves é frequentemente acompanhado de ensaios de alta frequência. Especialmente no caso de algumas peças-chave, é necessário passar dezenas de milhares de testes antes de ser autorizada a sua utilização.

Os robôs colaborativos têm sido gradualmente promovidos no domínio da massagem e da fisioterapia. A sua visão artificial permite localizar melhor os pontos de acupunctura do utilizador, de modo a conseguir um posicionamento e uma massagem precisos e obter melhores resultados.




