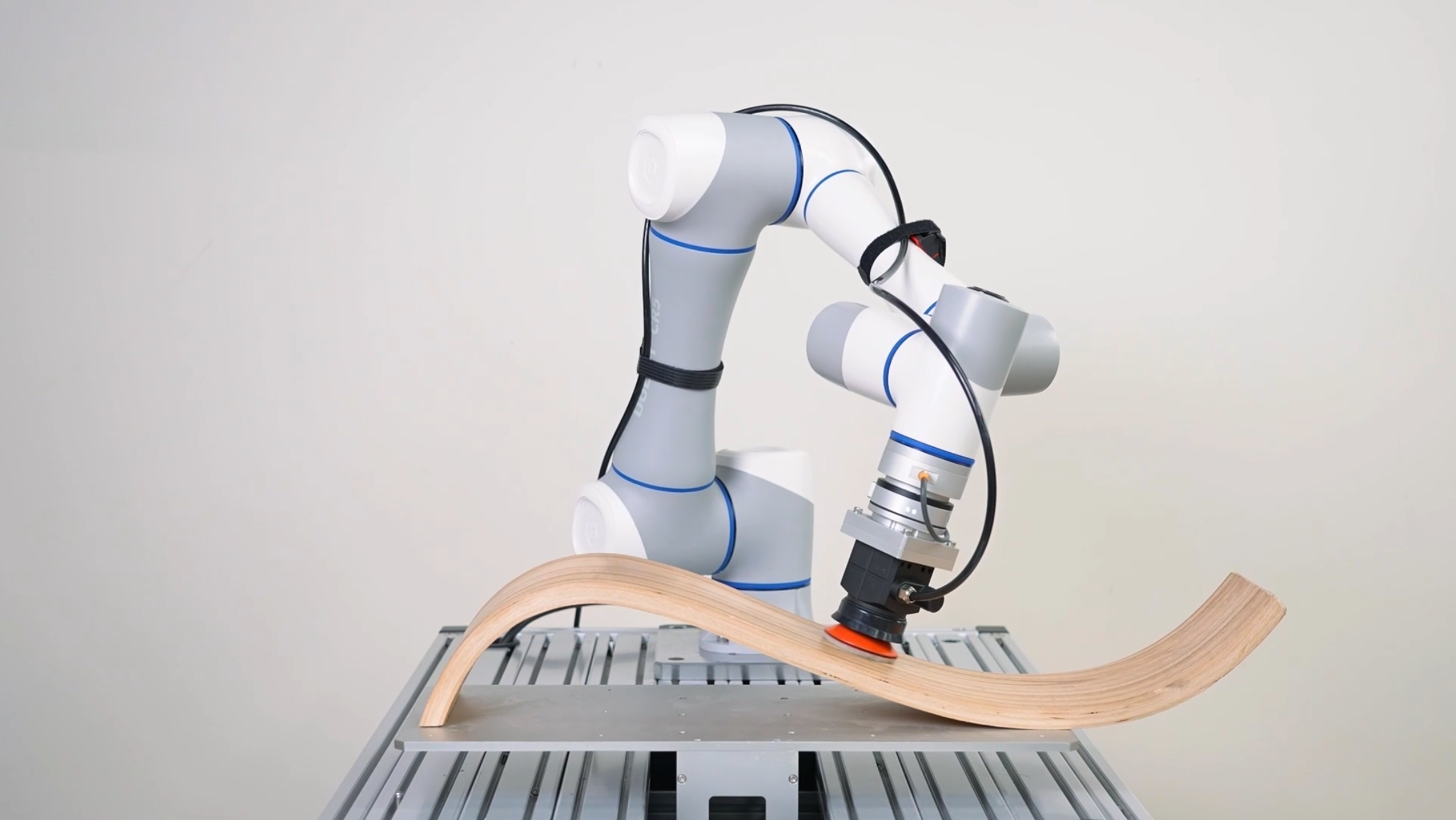
표면 연삭 작업에서 로봇은 일반적으로 머신 비전 시스템을 사용하여 불규칙한 표면의 연삭을 안내하고 찾아내고 실현합니다. 그러나 연삭빈도와 연삭강도의 변화에 따라 끝단 연삭재료의 소모량은 비선형적인 변화를 보이며 실제 연삭강도를 조정하기 위해 알고리즘 보상에 의지하기가 쉽지 않아 정밀 연삭에서 좋은 결과를 얻을 수 없다. 그리고 연마.
F/T 센서는 로봇 힘 제어면 연삭에 적용되어 미세 연삭 및 연마를 위한 힘/토크와 같은 피드백을 제공하고 제어 링크에서 폐루프 피드백을 형성하여 특히 제품의 연마 효과를 크게 향상시킵니다. 작은 공작물, 가장자리 버, 불규칙한 표면 및 오노 금속 재료 연삭 등의 측면에서.
동시에 로봇 힘 제어의 도입은 인간과 컴퓨터의 상호 작용을 더 잘 실현하고 실제 생산 운영 프로세스에서 보다 유연한 임피던스 제어를 달성하며 인간과 컴퓨터 상호 작용의 안전과 신뢰성을 보장할 수 있습니다.