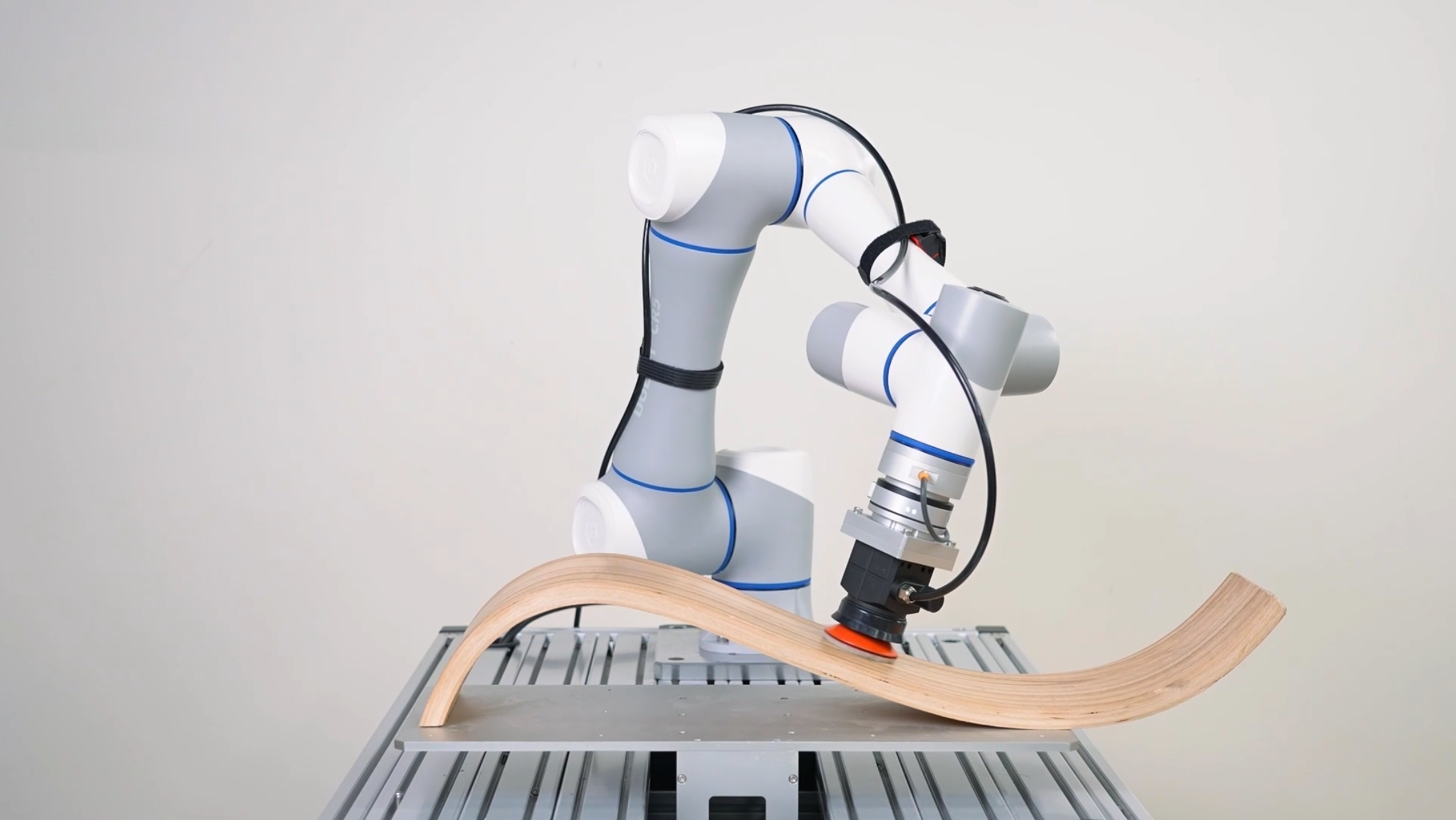
في عملية الطحن السطحي، يستخدم الروبوت عادةً نظام رؤية الماكينة لتوجيه وتحديد موقع وتحقيق طحن السطح غير المنتظم. ومع ذلك، مع تغيير تردد الطحن وقوة الطحن، تُظهر درجة استهلاك مواد الطحن النهائي تغيرًا غير خطي، وليس من السهل إعادة استخدام تعويض الخوارزمية لضبط قوة الطحن الفعلية، لذلك لا يمكن تحقيق نتائج جيدة في الطحن والتلميع التفصيلي.
The F/T sensor is applied to robotic force control surface grinding to provide feedback such as force/torque for fine grinding and polishing, and forms the closed-loop feedback in the control link, which greatly improves the polishing effect of the product, eapecially in the aspects of small workpiece, edge burr, irregular surface and ono-metallic material grinding and so on.
At the same time, the introduction of robot force control can better realize human-computer interaction, achieve more flexible impedance control in the actual production operation process, and also ensure the safety and reliability of human-computer interaction.
.jpg)