75mm 300N 30Nm 6 Axis Force Sensor for Collaborative Robots Industrial Robots
Description

The system design of KWR75DP adopts a modular architecture, which includes signal conditioning circuit, analog-to-digital conversion circuit (ADC), microprocessor and control circuit, power management circuit, communication interface circuit, and protection and isolation circuit. Each module works together to build a complete “signal acquisition processing output” link. Among them, the signal conditioning circuit is responsible for converting the force and torque in the six axis direction into weak electrical signals, accurately amplifying the signals of each axis through a dedicated instrument amplifier, and suppressing environmental noise with the help of a multi-channel bandpass filter. At the same time, based on the six axis joint calibration crosstalk compensation algorithm, the coupling between axis signals is dynamically eliminated, providing key guarantees for the efficiency and reliability of signal acquisition.
The KWR75DP six axis force sensor has become a key sensing component in the field of collaborative robots due to its multi axis synchronous measurement, high precision, and high response speed, playing an important role in precision manufacturing scenarios. For example, on an electronic component assembly line, collaborative robots use this sensor to monitor the contact force in the Fx and Fy directions of the end effector in real-time (with an accuracy of 0.1% F.S.). When the collision force exceeds a safety threshold of 5N, the control system can quickly trigger deceleration or stop commands to ensure human-machine safety; In the bolt tightening process, sensors accurately monitor the Mz direction torque, combined with Fx and Fy offset force data, which not only controls the tightening torque error within the standard range, but also avoids the deformation problem of parts caused by uneven force.
 |
 |
 |
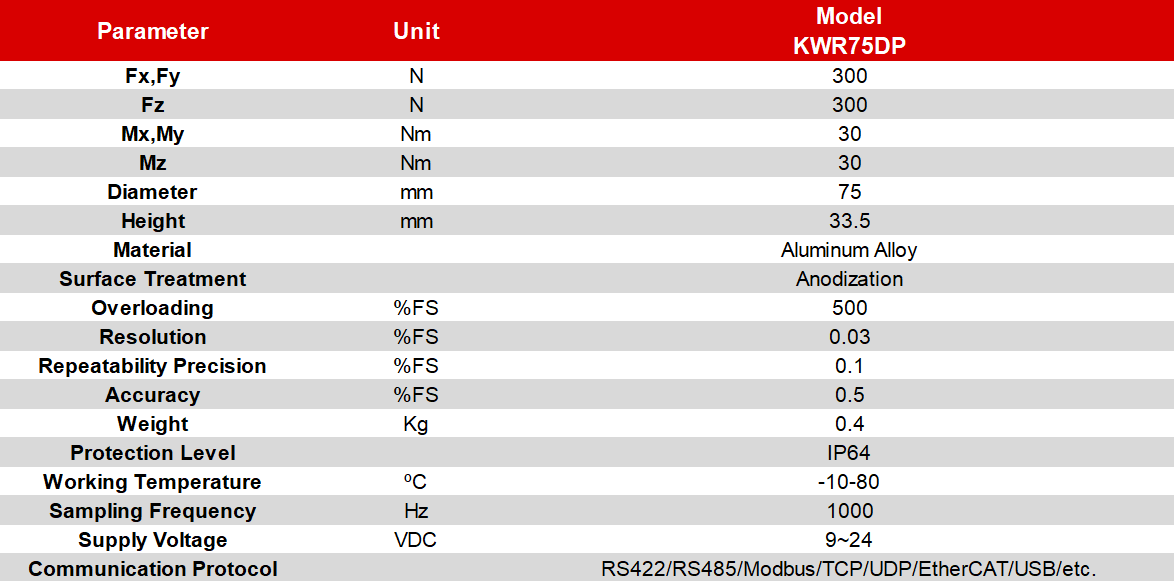
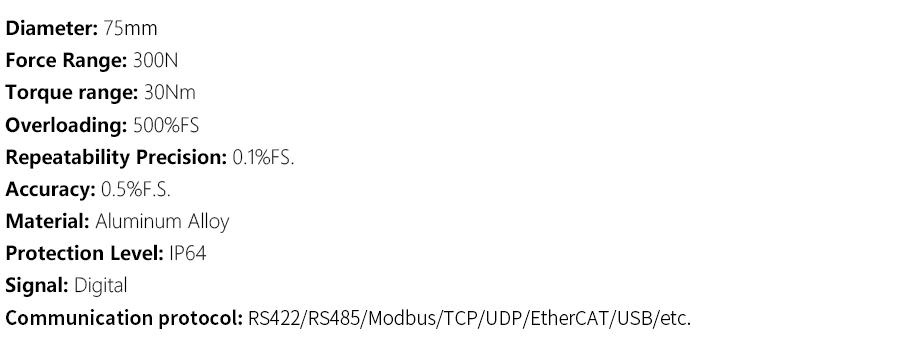
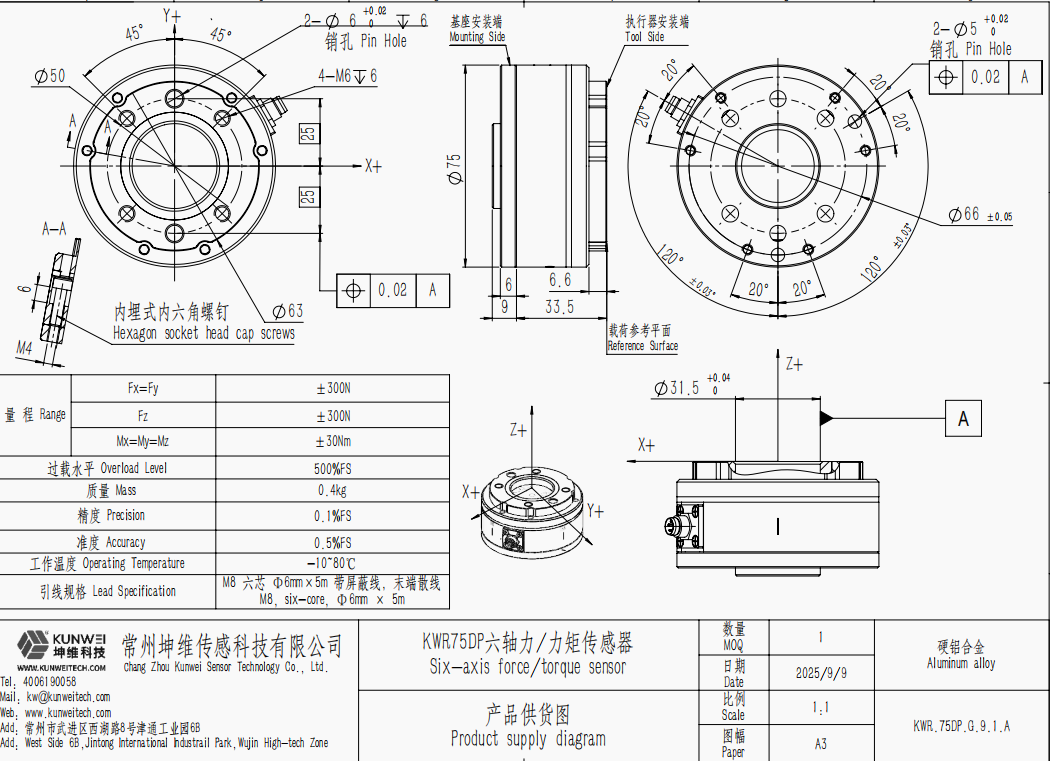
Model of KWR75DP