

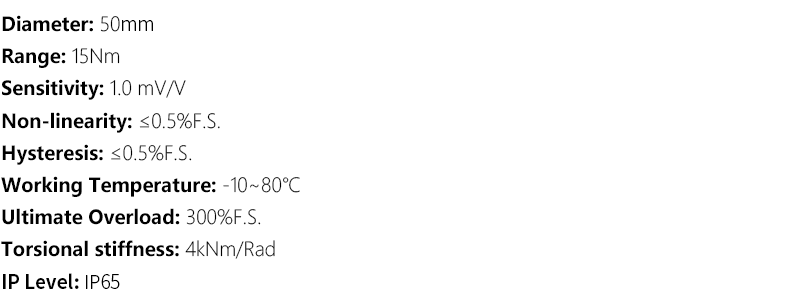
Customize 50mm 15Nm Static Robot Joint Torque Sensor
Description

This torque sensor is based on the principle of resistance strain measurement, which is a mature and widely used technology in the field of torque measurement. Inside the sensor, a specialized strain gauge is firmly attached to the strain beam using strain glue, and output in the form of a Wheatstone bridge circuit. When the strain beam is subjected to torque, the strain gauge will deform and its resistance value will change accordingly. The Wheatstone bridge circuit converts this resistance change into an electrical signal, which can be output as an electrical signal proportional to the torque after subsequent circuit processing, thus achieving accurate measurement of the torque magnitude.
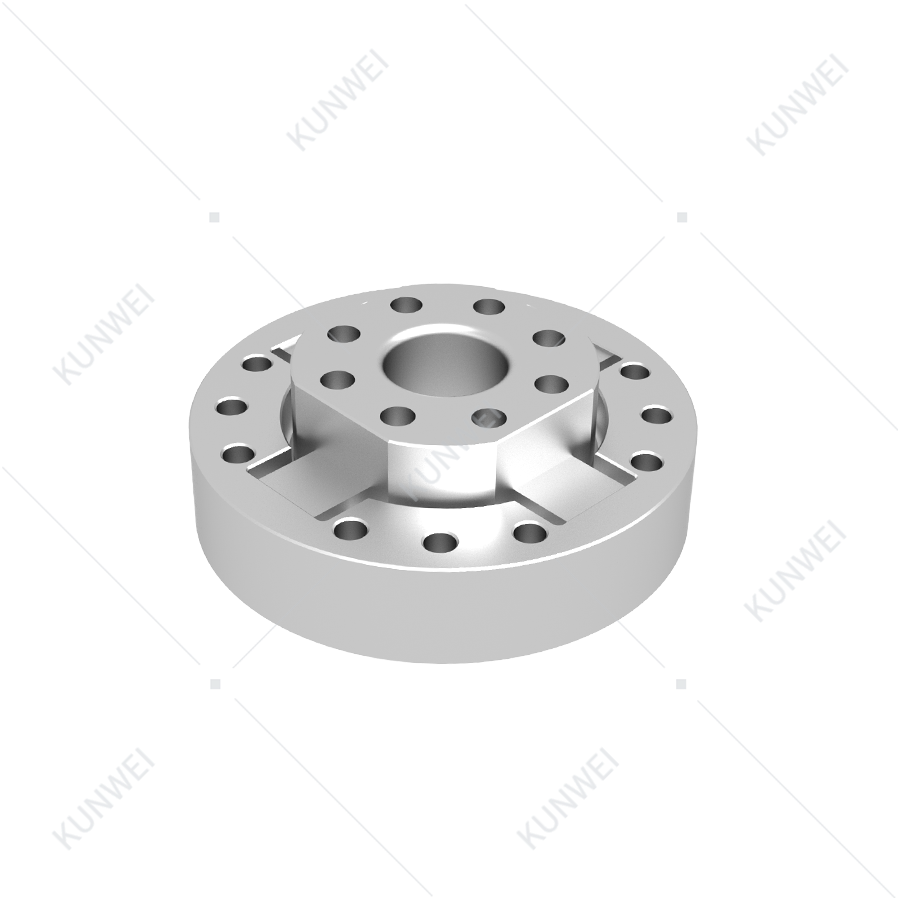
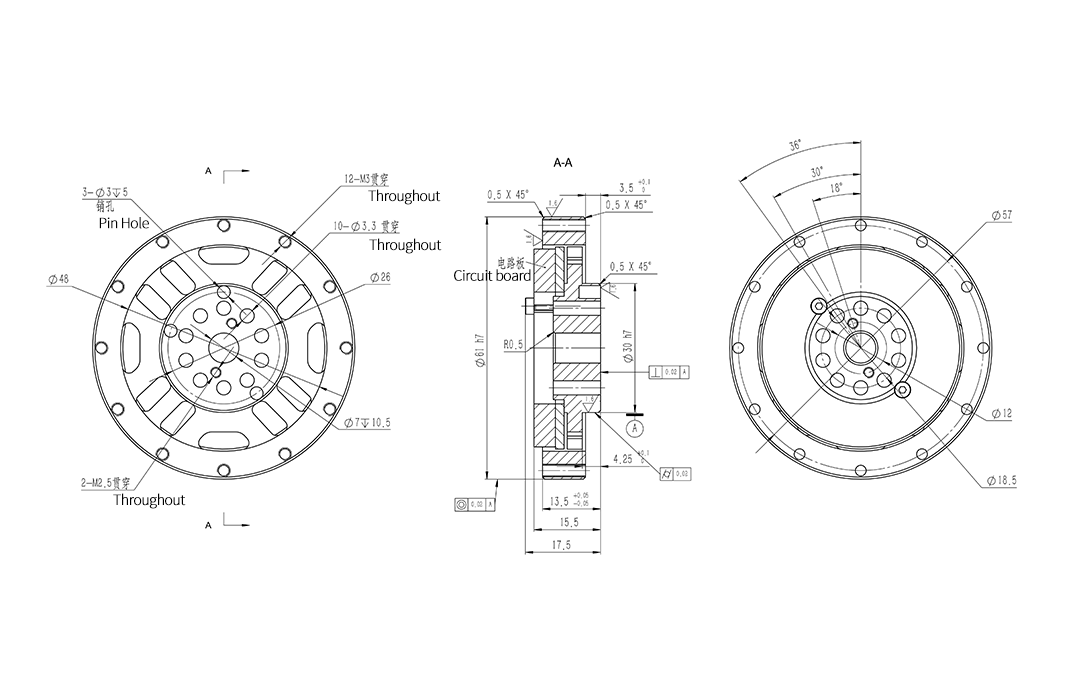
This product has a compact structural design, small size, flexible installation method, and is suitable for various small space scenarios. Taking robot joints as an example, this product can be installed in joint areas with limited space and will not interfere with the overall layout and motion of mechanical structures. The manufacturing of sensor KWR50N15 adopts high-quality and high-strength stainless steel material, ensuring the stability and reliability of the sensor when subjected to torsional torque, and can adapt to harsh working environments. This product adopts aerospace grade manufacturing technology, ensuring high precision and reliability of the product. The sensor has good sealing performance and can achieve a protection level of IP65, which is conducive to preventing external interference factors such as dust and moisture from entering the interior of the sensor, protecting the internal electronic components from damage, and extending the service life of the sensor.
 |
 |
 |
Our company has an experienced sensor R&D team, from the sensor material heat treatment, structural design to hardware and software design, etc., have the ability of independent research and development, and the ability to manufacture independently. This product uses high-quality 17-4PH steel. It has strict factory inspection system and perfect material inspection process. It is strictly controlled from the aspects of incoming material inspection, microstructure analysis, material heat treatment, finished product microstructure inspection and so on. The material mechanical properties of the sensor are significant due to other products in the same industry, and the hardness can reach HRC42-44.
Model of KWR50N15



















