200mm Alloy Steel Multi Axis Force Torque Sensor for Robot Base
Description

KWR200 series is an embedded high-bending six-axis force sensor with large torque range, good bending resistance and high overload level. The main body of the product is made of high-strength alloy steel with compact structure, which can meet the use requirements of high rigidity and high strength, and the product has high stability. This product has a built-in high-strength embedded data acquisition and calculation system, and its good optimized decoupling algorithm ensures that the product outputs high-precision measurement values.
It can be matched with serial port server equipment to support the use of Ethernet related computer and terminal equipment.
Advantage :
1) Program complex tasks the easy way. It is very easy to install and deploy, and ordinary employees can quickly learn how to operate in a timely manner, which can greatly save time and labor costs.
2) IP64 Rating, This means that our products can be produced in regular production workshops .Has dustproof and waterproof performance.
3)force-sensitive. Our precision is 0.5%FS, that means our products can catch and read very subtle changes in force values.
4) Master force control in no time.
5) Increase robot-cell reliability and flexibility.
Transform your production process by automating the most advanced force-sensitive applications on the market. Program complex robot movements in minutes—no robotics expertise needed. The result is a strong and flexible robot cell.
What is a Six axis Force Sensor ?
An 6-xis force Sensor is a device that is fitted onto the wrist of your robot to detect forces and torques that are applied to the tool. Since it is between the robot and the tool, it used to read what is going on with the tool. It can sense forces due to an impact or if the tool cannot insert a part in an assembly process. The FT sensor allows the robot to recognize forces on another level of the robot, it can now feel what is going on with its tool.
How Does The Sensor Feel the Force?
About feel the force, we are talking about any force exerted on the sensor. The casing part of the sensor is attached to the robot wrist. And the moving part is attached to the tool side. When a force is applied on the tool, the sensor reads the distance that the moving part has moved from the casing, depending on the amplitude of the displacement, the sensor returns a force signal to the computer. With the KUNWEI sensor, this reading is digital right from the start, making the signal very clean with minimal inherent noise and immune to external electromagnetic noise.
 |
 |
 |
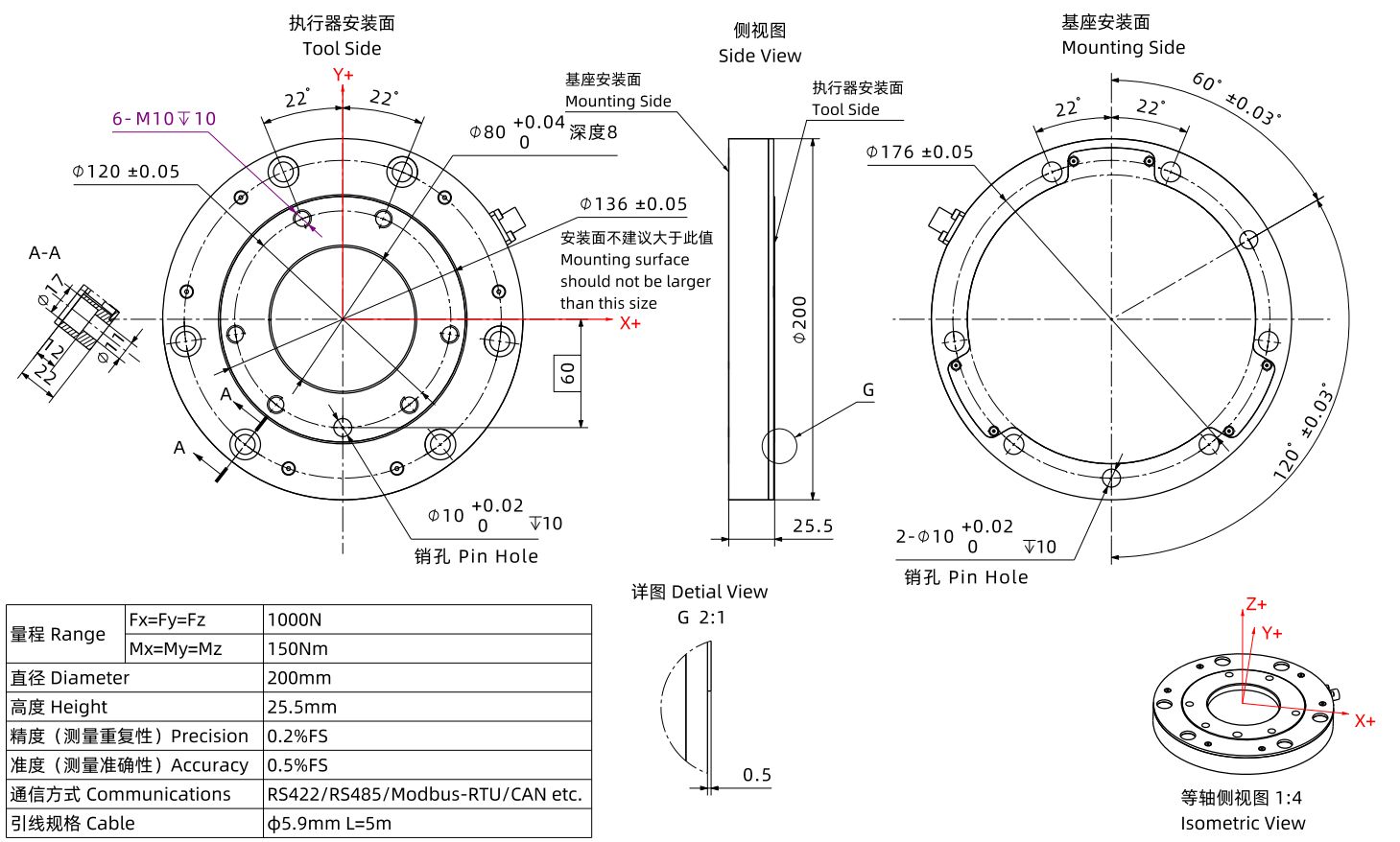
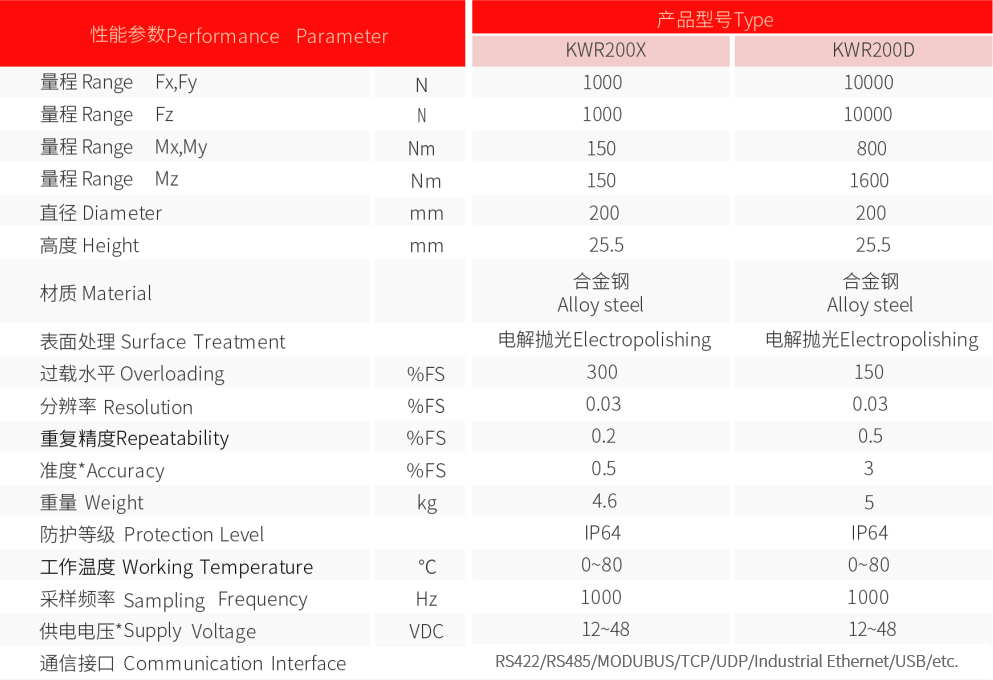
Model of KWR200

In the future, we will continue to strive for excellence in products and help the new era of flexible intelligent manufacturing!









.jpg)
.jpg)