

Static 61mm 66Nm RS485 Torque Sensor for Robot Joint
Description

In the design process of KWR61N66 torque sensor with RS485 digital output, circuit design is the core link to ensure that the sensor can accurately and stably convert torque into measurable electrical signals. Its design quality directly affects the performance, accuracy, response speed, and reliability of the sensor.
Sensor circuits typically consist of several key modules, including signal conditioning circuits, analog-to-digital conversion circuits (ADCs), microprocessors and control circuits, power management circuits, communication interface circuits, and protection and isolation circuits. These modules work together to achieve signal acquisition, processing, and output. Module 1: The signal conditioning circuit amplifies, filters, and linearizes the weak signal output by the sensor to match the input requirements of subsequent circuits. Usually composed of amplifiers and filters, such as operational amplifiers (Op Amps) and instrumentation amplifiers (Instrumentation Amplifiers), used to amplify weak signals, and low-pass, high pass, and band-pass filters used to suppress noise and interference. Module 2: The function of analog digital conversion circuit (ADC) is to convert analog signals into digital signals for processing by microprocessor or digital system. Key parameters include resolution (digits), sampling rate, conversion time, quantization error, etc. Module 3, the functions of the microprocessor and control circuit include further processing of digital signals (such as filtering, calibration, compensation) to achieve the intelligence of sensors. Usually composed of microcontrollers (MCUs) and digital signal processors (DSPs), microcontrollers are typically used to execute algorithms, control peripheral circuits, and implement communication protocols. Digital signal processors are used for complex signal processing tasks. Module 4, the main function of the power management circuit is to provide stable power supply for sensors and their circuits, and reduce power consumption. It is usually composed of a voltage regulator and a power switch. Voltage regulators include LDO (Low Dropout Linear Regulator) and DC-DC converters. The power switch is used to control the power supply status of the circuit and achieve low-power mode. Module 5, communication interface circuit, can achieve data transmission between sensors and external devices (such as upper computer, other sensors). Common interfaces are divided into wired interfaces and wireless interfaces. SPI, I ² C, UART, RS-485, etc. are wired interfaces, while Bluetooth, Wi Fi, ZigBee, LoRa, etc. are wireless interfaces. Module 6, protection and isolation circuit, can protect sensors and their circuits from damage such as overvoltage, overcurrent, electrostatic discharge (ESD), etc. Composed of transient voltage suppressor (TVS) and optocoupler isolator, it is used to suppress overvoltage pulses, achieve electrical isolation, and improve safety.
 |
 |
 |
Joint torque sensors play an important role in both robotics and automotive fields. In the field of industrial robots, KWR61N66 joint torque sensors are widely used as key force feedback components in precision assembly, surface polishing, and automated welding processes. Specifically, in the automated assembly production line, the sensor monitors the torque changes during the bolt tightening process in real-time (with a measurement accuracy of ± 0.5% FS) to ensure that the connectors meet the preset assembly tolerance requirements; In precision polishing applications, it dynamically adjusts the contact pressure of the end effector through a closed-loop control system (with a control range of 0.1-10N), effectively avoiding surface damage to the workpiece caused by overload. For collaborative robot (cobots) systems, torque sensors play an irreplaceable role in ensuring safety. By collecting real-time contact force signals from the human-machine interaction interface (with a sampling frequency of up to 1kHz), when abnormal torque exceeding the safety threshold (usually set at 5-15Nm) is detected, the control system can trigger an emergency braking protocol within 50ms, significantly reducing the risk of occupational injury. In the field of biomimetic robots, researchers have successfully simulated the human motion control mechanism using a distributed torque sensing network, especially in the dynamic balance control of bipedal robots. Through real-time torque compensation of each joint (response time<10ms), humanoid gait adaptability has been achieved. The application of torque sensors in the field of robotics has greatly improved the intelligence and safety of robots, making them play a key role in various fields such as industry, healthcare, aerospace, etc. With the development of technology, its accuracy and reliability will be further enhanced, promoting the progress of robot technology. Similarly, in the automotive field, it can be used for testing automotive components and new energy systems, for torque testing of steering systems, braking systems, or transmission systems, to verify the performance of components under extreme working conditions. According to relevant literature, high-precision torque sensors can control the tightening torque of each bolt on the transmission assembly line, ensuring a tight fit of components such as gears and shafts inside the transmission, reducing abnormal noise and vibration caused by improper assembly, and improving the reliability and service life of the transmission. In terms of new energy vehicles, the characteristic of electric motors is that they can instantly output maximum torque, so electric vehicles usually start and accelerate very quickly, with direct, smooth, and delay free power response, providing excellent driving pleasure. This product can be used to measure the output torque of motors. The vehicle control system accurately controls the motor speed and output power based on torque data, achieving stable acceleration, efficient deceleration, and energy recovery.
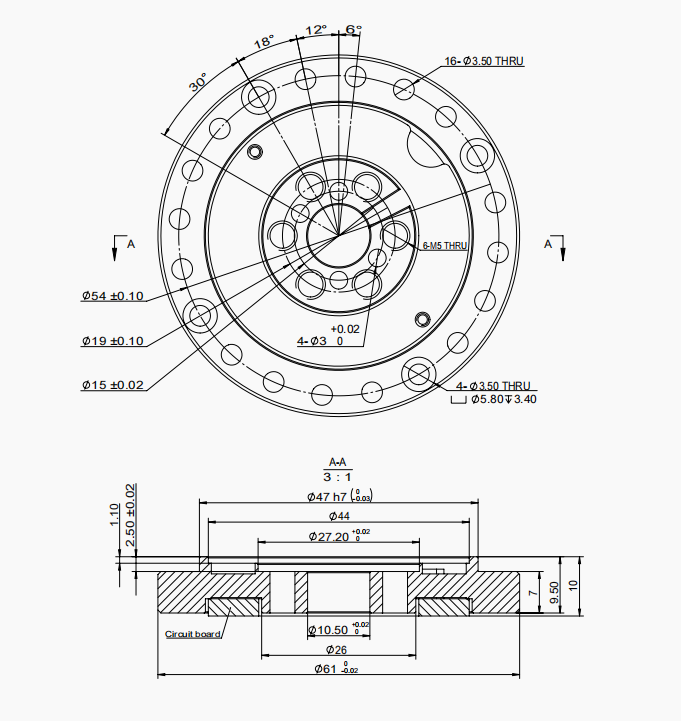
Model of KWR61N66



















