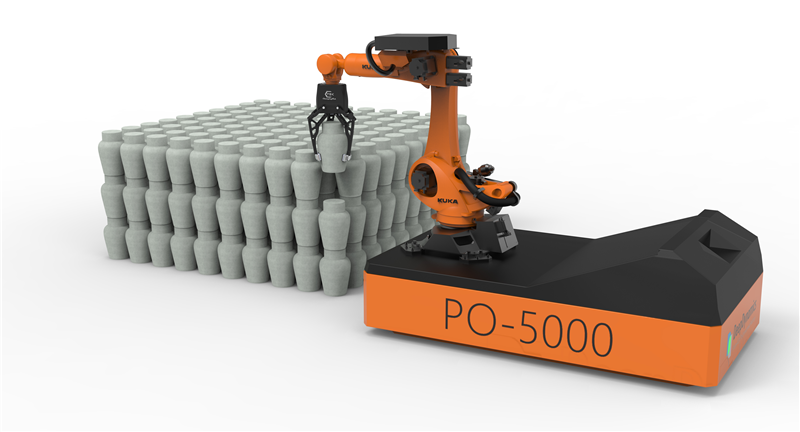
로봇 그리퍼가 무언가를 잡을 때 그리퍼와 모터의 경사각을 조정하기 위해 그리퍼의 모터에 의해 종종 제어되어 그리퍼 끝과 물체를 잡을 수 있습니다. 그러나 도자기, 유리, 심지어 공과 같은 깨지기 쉬운 물체에 대한 변위 제어의 현실성과 효율성을 완전히 보여주기는 어렵습니다. 특히 그림의 포도주 제단은 수동 소성에 대한 크기 차이가 크기 때문에 불규칙한 형태의 구조입니다. 3개의 그리퍼가 독립적으로 작동하고 파악 적합성을 효과적으로 판단하는 방법이 핵심 난제입니다.
Kunwei 손가락 끝 힘 센서는 불규칙하고 깨지기 쉬운 물체를 잡는 데 탁월한 성능을 발휘합니다. 테스트 단계에서 측정된 파지력 값으로 피드백 제어를 수행할 수 있습니다. 손가락 끝의 힘 센서는 파지력 값을 실시간으로 느끼고 단말기에 실시간으로 피드백합니다. 그리퍼의 각 손가락 끝 센서가 균형 잡힌 힘 값을 느끼면 업그레이드 및 기타 후속 작업이 가능합니다.
.jpg)