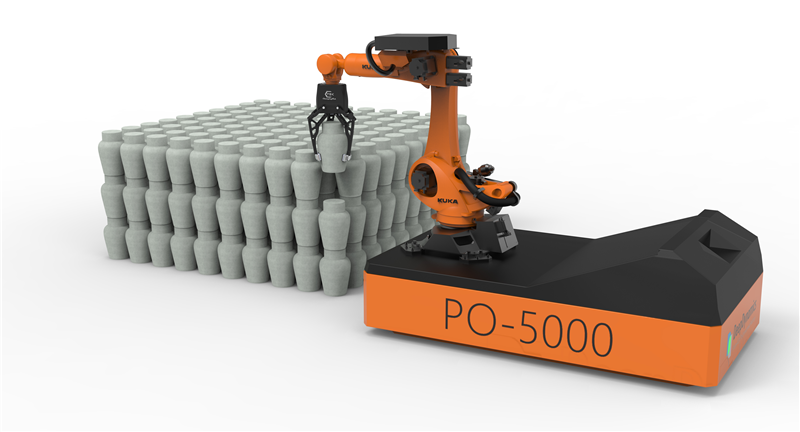
When robot gripper holds something, it is often controlled by the motor on the gripper to adjust the inclination angle of the gripper and the motor, so as to realize the grasping of the end of gripper and the object. However it is difficult to fully show the realiability and effectiveness of the displacement control for fragile objects, such as ceramics, glass, and even balls. Especially the wine altar in the figure, are an irregular shape structure because of the large size differences for manual firing. How the three grippers work independently and effectively judge the grasping fit is the core difficulty.
Kunwei fingertip force sensor performs excellently in grasping the irregular and fragile object. The feedback control can be carried out by the grasping force value measured in the test stage. The fingertip force sensor feels the grasping force value in real time and feeds back to the terminal in real time. When each fingertip sensor on the gripper feels a balanced force value, it can be upgraded and other follow-up work.
.jpg)