

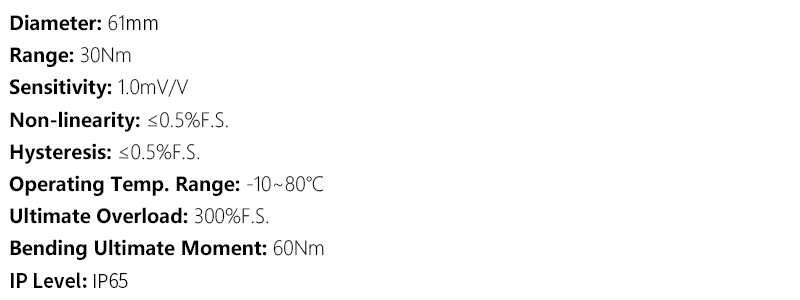
Static 61mm 30Nm RS485 Torque Sensor for Robot Joint
Description

In the design process of KWR61N30 torque sensor, in order to further study the torque sensor, we first conducted mechanical analysis on the sensor to accurately determine the adhesive position of the strain gauge; Next, analyze the deformation of the strain gauges in detail; Subsequently, finite element analysis software was used to optimize the material selection and body structure of the torque sensor. Finally, the sensor is statically calibrated using a calibration device to obtain key performance indicators such as sensitivity, linearity, and hysteresis. The research results indicate that material selection has a significant impact on the performance of torque sensors. The use of high-strength alloy steel materials can effectively improve the accuracy and reliability of sensors.
 |
 |
 |
High strength alloy steel materials not only have high elastic modulus, but also excellent fatigue resistance, which can effectively cope with long-term working stress and alternating loads. In addition, the material has a stable temperature coefficient of resistance and a low coefficient of thermal expansion, significantly reducing the interference of temperature changes on measurement results. High strength alloy steel materials usually have both high elastic modulus and low creep characteristics, which can maintain small deformations even under continuous stress, effectively reducing measurement errors and greatly improving the accuracy and reliability of sensors. Torque sensors need to maintain stable performance during long-term operation. High strength materials, with their excellent fatigue resistance and corrosion resistance, can resist the influence of environmental factors such as temperature changes, humidity, chemical corrosion, etc. In practical applications, torque sensors may encounter instantaneous overload or impact loads. High strength materials can withstand higher stress peaks, avoiding permanent deformation or damage caused by overload, thereby extending the service life of sensors. In special application scenarios such as high temperature, high pressure, strong vibration, etc., torque sensors need to have stronger environmental adaptability. High strength materials usually have better thermal and mechanical stability, which can maintain stable performance under harsh working conditions and meet the needs of complex applications.
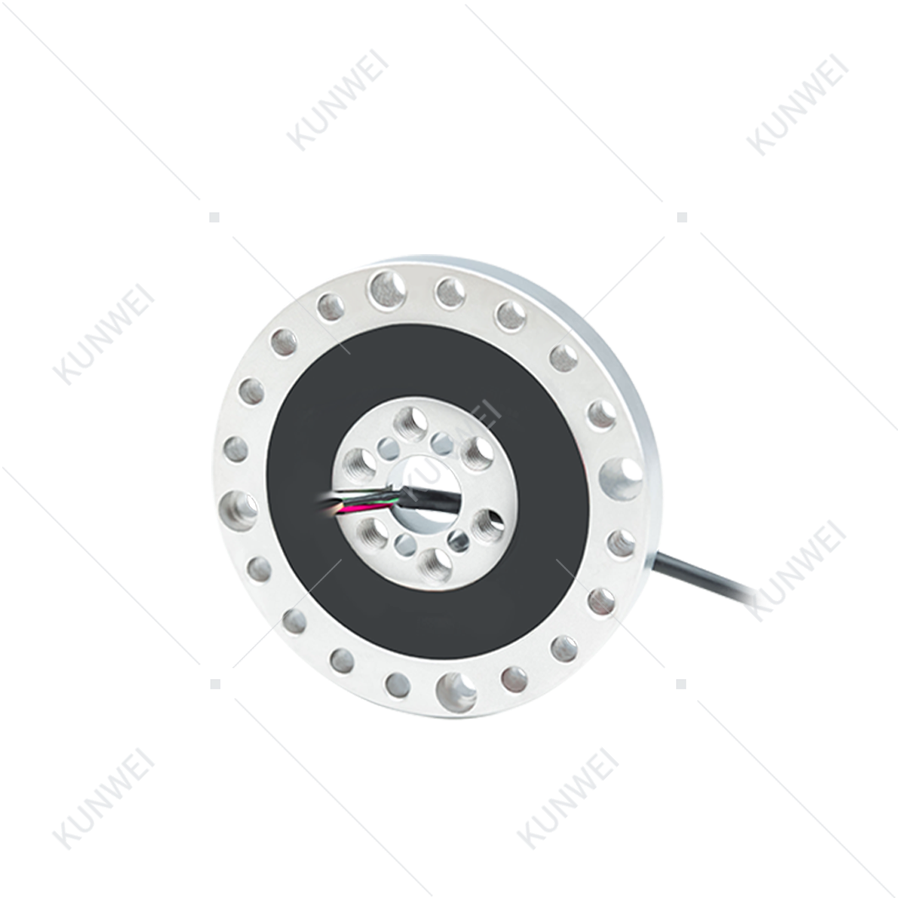
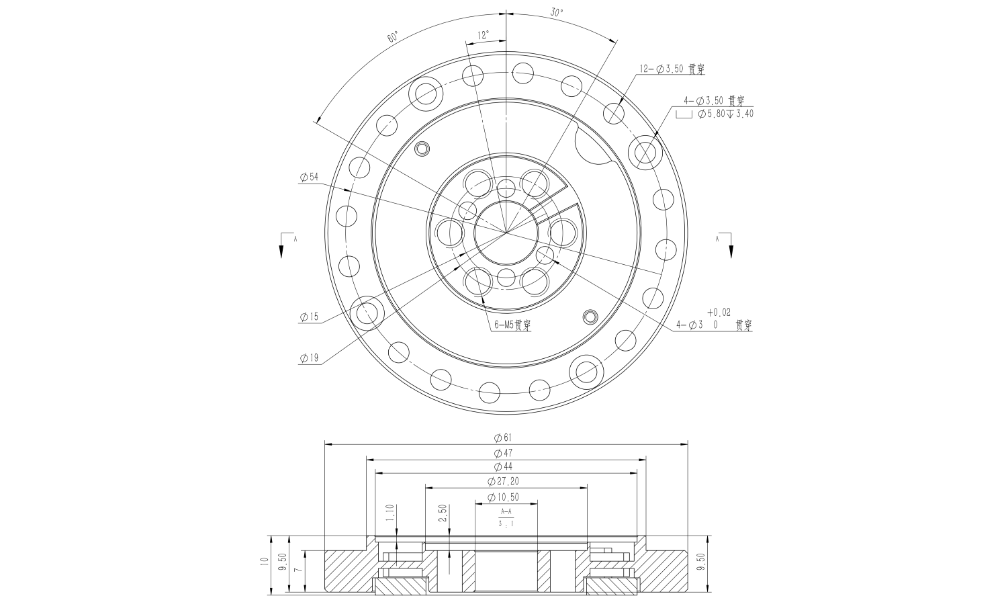
Model of KWR61N30

The KWR61N30 joint torque sensor has a wide range of applications in the field of medical equipment. This sensor has significant application value in the field of surgical robots. Embedding it into the joints of minimally invasive surgical robots can monitor the contact force between the robotic arm and tissue in real time, ensuring the accuracy and safety of surgical operations and effectively avoiding tissue damage caused by excessive torque. For example, in the development process of surgical robots and artificial joints, torque sensors can assist manufacturers in accurately measuring the torque of medical devices, ensuring their compliance with safety standards and requirements, thereby ensuring medical safety.
This type of sensor is widely used in the field of rehabilitation equipment, including intelligent prostheses, exoskeleton rehabilitation robots, etc. By monitoring joint torque and accurately capturing the patient’s movement intention, personalized assistance control can be achieved, thereby significantly improving the effectiveness of rehabilitation training. The journal “Chinese Journal of Rehabilitation Medicine” pointed out that sensors with an outer diameter of 61mm and a range of 30Nm have shown significant applicability in rehabilitation robots and can effectively meet the needs of patients’ joint training. The application of joint torque sensors in the torque measurement device of the dummy trunk provides a solid technical guarantee for the development of rehabilitation equipment.


















